Proportional Derivative and Proportional Integral Derivative Controllers for Frequency Support of a Wind Turbine Generator in a Diesel Generation Mix
 , Chandana Ramasawmy 2, Abdel Khoodaruth 3
, Chandana Ramasawmy 2, Abdel Khoodaruth 3
Adv. Sci. Technol. Eng. Syst. J. 8(4), 60–65 (2023);
 DOI: 10.25046/aj080407
DOI: 10.25046/aj080407
The levelized cost of electricity production is highly dependent on the cost of fuel oil on the world market. In order to reduce the dependency on the fuel oil, many countries are adopting an energy transition towards distributed generation. Distributed generation can be described as various means of generating electricity at or near where it will be used. Such generating mode can be a solar PV system, wind turbine generator and other renewable energy sources. However, it entails lots of challenges as it uses power electronics devices as the power grid interface, which causes a reduction in the system inertia and at the same time affecting the frequency, thereby affecting the stability. To enhance this stability, appropriate control measures need to be adopted. This paper brings forward a novel approach for frequency control support of a wind turbine generator (WTG) in a diesel generation mix. The novelty of this research paper explained on the concurrent application of a Proportional derivative (PD) and a Proportional Integral Derivative (PID) for speed and frequency control in a WTG. The analysis of this experimental research was carried out through the modelling of the rate of change of frequency (RoCoF) using MATLAB / Simulink software. The results showed that the use of these controllers in presence of WTG provide frequency support to the system as the frequency varied within the acceptable limit of 0.5Hz. Additionally, this experimental research work also proved that the use of speed / governor control in form of the PID improved the RoCoF and provided an enhancement in the stability of the test system. Finally, this paper confirmed that the integration of WTG to the grid required the use of appropriate control algorithm for an efficient exploitation of this kind of renewable energy source.
1. Introduction
COP 26 conference on the global climate established the importance on the reduction of the global temperature increase to 1.5°C as a mitigating action against the greenhouse gases [1]. Ιn line with this agreement, many countries are adopting a distributed generation policy as means of reduction of greenhouses gases. Distributed generation (DG) covers the whole spectrum of different power generating technology such as solar PV, wind energy, biomass, etc. [2]. According to [3], the exploitation of distributed generation system is emerging in the global energy market. A direct impact of this alternative form of power generation results in a lower cost of power production from renewable energy sources. In this respect, countries such as Germany and Denmark are making enormous progress in promoting the distributed renewable energy system in their generation mix [4]. Globally, solar PV and wind energy power generation are the most preferred technologies coming out in the light, with wind energy considered as the leading renewable energy source [5]. The increasing use of wind energy in the generation mix brings along a shift towards using power electronics devices as grid interface. The power electronics interface devices have undergone rapid development with semiconductor switches such as insulated gate bipolar transistor (IGBT) are now being used. A direct impact of this transition will result in reducing the inertia of the grid, which plays a primordial role in the stability of the grid. It is expected that the total inertia of the National Grid in UK will be reduced by up to 70% by 2033/34 [6], [7]. To maintain a stable power grid with wind energy in the generation mix, it is required to avoid unnecessary frequency dip owing to the stochastic nature of the wind energy source. Therefore, the frequency stability of wind turbine provides a hot topic for research.
Previous research works carried on the subject show a replete of control mechanism on the frequency support. In [8], the authors introduced a low order system frequency model with high penetration of wind power plant. This method studies the power system frequency changes during the most critical time, which is ≤ 30 s [9]. It was observed that initial conditions do not have a significant impact on the frequency response. However, the research paper in [8] highlighted on some major limitations of this experiment with regards to the effect of variable speed on the wind turbine generation system (WTGS). In [10], a comparative analysis between wind turbine generation (WTG) and a solar PV system was established. It was observed that wind turbine (WT) requires an extensive control mechanism to be able to provide a stable power as stability was not attained within the first swing. To further substantiate on the research for frequency control support for WT, an efficient control of inertia emulation and frequency support in presence of WTG was proposed in [11]. The experiment proposed a model free control (MFC) strategy for inertia emulation and frequency support of a diesel wind grid system. The MFC employs an approximation-based intelligent proportional integral derivative (PID) controller experiment. The online estimation technique [12] from input-output measurements is a key concept of MFC to approximate the complex system. It was concluded from this experiment that the use of MFC provided a precise inertia emulation and necessary frequency support. Other works on inertia emulation were carried out by [13]-[16].
In [17], the authors adopted a novel approach of using small signal analysis for frequency response of WT. The method depicts a Klein Rogers Kundur (KRK) two area, four generator system. The model was modified to accommodate an additional generator G5 on bus 13. It was concluded from this experiment that integration of wind energy without any frequency control will deteriorate the frequency response of the system. A proper control of the WTG provides necessary frequency support of the system. In [18], the feasibility of using a double fed induction generator (DFIG) to implement frequency regulation was investigated. It was observed that adjustable frequency wind turbines can undertake the frequency regulation responsibility of the power grid. A coordinated primary frequency regulation was considered as essential between the diesel generator (DG) and the WTG. In [19], an assessment of the impact of wind generation on system frequency control was made, where a time series sampling methodology was proposed over a timeframe period for assessing the impact of increased penetration of wind energy. It was concluded that future power system with an increasing penetration level of DFIG and greater levels of High Voltage DC (HVDC) interconnection will present significant frequency control challenges to system operators.
The above expose clearly shows that integrating wind energy to the grid is indeed very challenging due to a reduction of system inertia. It gives a broader picture of the research carried out in the development of the frequency support. Inspired by these obstacles, the rationale of this work was to develop a novel approach of frequency support algorithm, through the concurrent use of a Proportional Derivative (PD) controller and Proportional Integral Derivative (PID) controller.
The remaining of this research paper is structured as follows. Section 2 describes an overview of the system frequency response mechanism, while the methodology is detailed in Section 3. Section 4 showcases the simulations and results based on the principle laid down in Section 3. Section 5 treats about the discussion of the results obtained, whereas Section 6 concludes this research paper.
2. Overview
This section explains the vital role played by the frequency to maintain a stable power with the grid. As per [20], frequency stability is the ability of the power system to maintain a steady frequency following a transient occurrence, which leads to a power mismatch between generation and load. Therefore, it is required to avoid large rate of change of frequency (RoCoF) through application of necessary frequency control. The RoCoF is one of the indicators, which gives the soundness of the system frequency response (SFR).
A frequency control can act in three level steps namely [21]
- Primary Response
- Secondary Response
- Tertiary Response.
Figure 1 shows the frequency response steps in the event of a loss of generation.
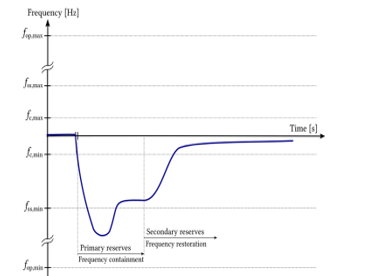
Figure 1: Frequency response in the event of a loss of generation
Another indicator, which can evaluate the system frequency response (SFR) is the frequency nadir. The frequency nadir is the minimum frequency reached during a transient period. It is therefore primordial to understand the role of frequency in maintaining a sound network particularly in presence of renewable energy sources like WTG. The next section explains the relation between the power imbalance brought in by the frequency disturbance and the system inertia. It also shows that the RoCoF is dependent on the speed of the generator. Hence the importance of having a governor and speed control in the integration of a wind farm.
3. Methodology
Stability of power system is deeply impacted by large frequency deviation. In order to understand the impact of the frequency deviation on the power system, it is required to understand the swing equation, which gives the variation of the system inertia (H) with respect to the change in power Equation (1) gives the swing equation.
where
ΔP: Accelerating power (pu)
δ: Rotor angle (rad)
: Angular speed (rad/s).
H: Inertia (MJ/MVA)
Pm: Mechanical power (pu)
Pe: Electrical power (pu)
According to [22], the acceleration of the prime mover caused by the unbalanced torque is governed by the equation of motion as in (2)
where
J: Combined moment of inertia of generator and turbine (kg/m2)
: Angular velocity of the rotor (mech. rad/s)
t: Time (s)
Given that kinetic energy of the rotating masses is represented by
As
Hence based on (7), the power imbalance brought in by the nature of wind directly impact on the system inertia (H) and the RoCoF (df/dt). Therefore, it is required to have a low RoCoF and additional synthetic inertia to counter the change in power.
As per [23], the maximum power that can be harnessed from a WTG is governed by (8) below
![]()
where
P: Power reaped from the WTG (W)
ρ: Density of air (kg/m3)
A: Area of blade (m2)
V: Velocity of wind (m/s)
Equating (8) and (4), the following expression can be obtained
Based on (10), the wind speed directly affects the rate of change of frequency, RoCoF. Therefore, in order to exploit maximum power from the WTG, it will be necessary to provide a stable power to the grid by developing a governor and inertia control.
4. Simulations & Results
Having established the mathematical models that govern the frequency stability and power quality of a WTG, it is required to develop a power grid with integration of a WTG. A prototype grid in form of an IEEE 9-bus, with integration of a 2 MW WTG (G3), was used as a test case with a system frequency of 50 Hz. This is shown in Figure 2.
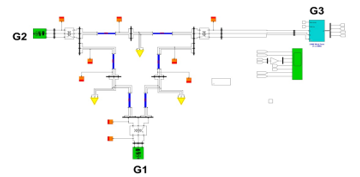
Figure 2: Integration of a Wind Turbine Generator in a generation mix
An initial experiment to assess the impact of integrating WTG, showed that large RoCoF occurred in the mix, which brought instability in the system. Figure 3 shows the unstable characteristics of the generation mix with presence of WTG.
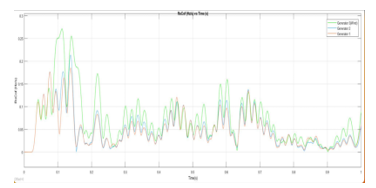
Figure 3: Large RoCoF in presence of WTG
In order to enhance the unstable nature of the system, Proportional Derivative (PD) and Proportional Integral Derivative (PID) controllers were connected in the WTG arrangement for rotor angle and speed control respectively. Such arrangement is shown in Figure 4.
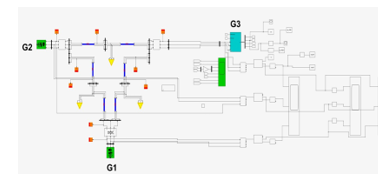
Figure 4: Arrangement of WTG with PD and PID Controllers
Proportional Derivative (PD) Controller
According to [24], a proportional derivative controller is a type of controller used where the output varies in proportion with the input signal. The block diagram of the PD controller used for the rotor angle controller is shown in Figure 5.
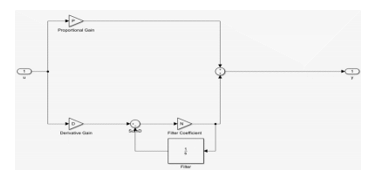
Figure 5: Block diagram of a PD controller used in a WTG
The output of the PD controller can be determined from the transfer function of the controller. The transfer function or gain of the controller gives the ratio of the output signal to the input signal. The gain of the PD controller can be calculated based on the following equation
where
Kp: Proportional gain
Td: Time derivative
Proportional Integral Derivative (PID) Controller
A proportional integral and derivative controller (PID) is a type of controller that uses three different controller types namely the proportional, integral and derivative controllers to set the output function. A typical block diagram of a PID controller is shown in Figure 6.
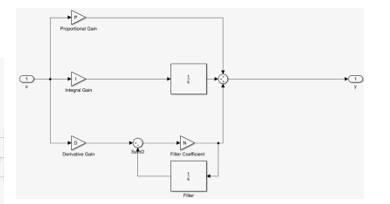
Figure 6: Block diagram of a PID controller
It works by calculating the error margin between the set point and the measured point. Similar to the PD controller, the transfer function of the PID controller will provide the desired output of the controller. The transfer function of the PID controller can be calculated as per (12).
![]()
where
Kp: Proportional gain
Td: Time derivative
The impact of the PI and the PID controllers was assessed through the temporal variation of the RoCoF over a period of 1s. The result in Figure 7 demonstrates that the contribution of the controllers brought about a reduction in the RoCoF. Hence, an enhancement in the stability of the system.
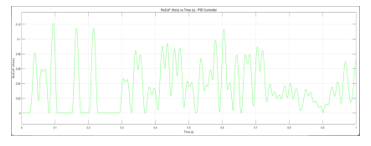
Figure 7: Temporal variation of RoCoF
Additionally, since a PID controller was used for the governor and speed control, the rate of change of frequency with respect to velocity was modelled. The contribution of the PID in the system brought a stabilization in the RoCoF. This is illustrated in Figure 8.
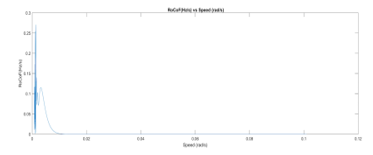
Figure 8: Variation of RoCoF with speed
5. Discussion
The objective of this research work was to develop a novel approach of using concurrently PI and PID controllers for frequency support of a WTG connected in a diesel generation mix. The test case developed in this paper showed that the controllers can provide frequency support to the system by reducing the RoCoF and stabilizing the frequency variation, within ±0.5 Hz as shown in Figure 9.
Additionally, this research work showed that this method proved to be more accurate than [25]. The virtual inertia control developed in [25] as a frequency support resulted in a frequency variation of ±0.8 Hz. Therefore, the concurrent use of PID and PD controllers may be the favoured way in enhancing the stability of a diesel and WTG generation mix.
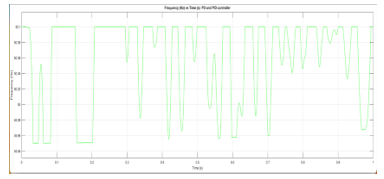
Figure 9: Temporal variation of frequency in presence of PI and PID Controllers
6. Conclusion
This paper discussed about the challenges of integrating a WTG to the grid. It also highlighted the role played by the frequency in arresting the extent of disturbance caused by the penetration of the WTG. Since a WTG is dependent on the external weather factor, any change in speed will result in a high rate of change of frequency, which will lead to power outage.
This research work has also demonstrated that the synchronization of a WTG to a grid is very challenging as it requires extensive control, in the form of PI and PID controllers. A combination of these control strategies constitutes the novelty in the frequency support, through the confirmation of the experimental results obtained. Therefore, it can be concluded that an extensive control concept is mandatory for an efficient exploitation of wind energy. However, the drawback in exploiting such type of renewable energy system will lie in the cost of investment.
This research work can be further extended to the analysis of multi-swing stability.
Conflict of Interest
The authors declare no conflict of interest.
Acknowledgment
This research work was assisted by Advanced Mechanical and Electrical Services Ltd. as part of the company’s research policy.
- M. Denchak, “Paris Climate Agreement: Everything You Need to Know,” NRDC, 2021, [Online], https://www.nrdc.org/stories/paris-climate-agreement-everything-you-need-know#sec-summary.
- Environmental Protection Agency, “Distributed Generation of Electricity and its Environmental Impacts,” https://www.epa.gov/energy/distributed-generation-electricity-and-its-environmental-impacts (Accessed: December 28, 2022).
- REN21, “Renewable Energy Policy Network for the 21st Century,” Renewables—Global Status Report; REN21 Secretariat: Paris, France, 2017.
- C.D. Iweh, S. Gyamfi, E. Tanyi, E. Effah-Donyina, “Distributed generation and renewable energy integration into the grid: Prerequisites, push factors, practical options, issues and merits,” Energies, 14(17), 5375, 2021 https://doi.org/10.3390/en14175375.
- H. Ibrahim, M. Ghandour, M. Dimitrova, A. Ilinca, J. Perron, “Integration of wind energy into electricity systems: Technical challenges and actual solutions,” Energy Procedia, 6, 815–824, 2011, https://doi.org/10.1016/j.egypro.2011.05.092.
- National Grid, “UK Future Energy Scenarios,” 2018, accessed: 2019- 05-15, [Online], http://fes.nationalgrid.com/media/1363/ fes- interactive- version- final.pdf
- E. Rakhshani, D. Gusain, V. Sewdien, J. L. Rueda Torres, M. A. M. M. Van Der Meijden, “A key performance indicator to assess the frequency stability of wind generation dominated power system,” IEEE Access, 7, 130 957–130 969, 2019.
- M. Krpan, I. Kuzle, “Introducing low‐order system frequency response modelling of a future power system with high penetration of wind power plants with frequency support capabilities,” IET Renewable Power Generation, 12(13), 1453–1461, 2018, https://doi.org/10.1049/iet-rpg.2017.0811.
- P.M. Anderson, M. Mirheydar, “A low-order system frequency response model,” IEEE Trans. Power Syst., 5(3), 720–729, 1990, doi: 10.1109/59.65898.
- A.A. Jhumka, R.T.F. Ah King, A. Khoodaruth, C. Ramasawmy, “Comparative Performance Analysis of Solar Energy and Wind Energy Systems using Rotor Angle Stability,” 2022 IEEE 7th International Energy Conference (ENERGYCON), Riga, Latvia, 2022, 1-5, doi: 10.1109/ENERGYCON53164.2022.9830452.
- U. Datta, J. Shi, A. Kalam, “Primary frequency control of a microgrid with integrated dynamic sectional droop and fuzzy based pitch angle control,” International Journal of Electrical Power & Energy Systems, 111, 248–259, 2019, https://doi.org/10.1016/j.ijepes.2019.04.001.
- M. Fliess, C. Join, H, Sira-Ramirez, “Non-linear estimation is easy”, Int. J. Modell. Identification Control, 4(1), 12-27, 2008, https://doi.org/10.1504/IJMIC.2008.020996.
- J Morren, S.W. Haan, L. Kling, J. Ferreira, “Wind turbines emulating inertia and supporting primary frequency control,” IEEE Trans. Power Syst. 21(1), 433-434, 2006, doi: 10.1109/TPWRS.2005.861956.
- J.M. Mauricio, A. Marano, A. Gomez-Exposito, J.L. Martinez-Ramos, “Frequency regulation contribution through variable-speed wind energy conversion systems,” IEEE Trans. Power Syst. 24(1), 173-180, 2009, doi: 10.1109/TPWRS.2008.2009398.
- B. Wang, Y. Zhang, K. Sun, K. Tomsovic, “Quantifying the synthetic inertia and load-damping effect of a converter-interfaced power source,” Proc. IEEE Int. Energy Conf. (ENERGYCON), Limassol, Cyprus, 1-6, 2018, doi: 10.1109/ENERGYCON.2018.8398838.
- S. Wang, K. Tomsovic, “A novel active power control framework for wind turbine generators to improve frequency response,” IEEE Trans. Power Syst. 33(6), 6579-6589, 2018, doi: 10.1109/TPWRS.2018.2829748.
- B. Park, Y. Zhang, M. Olama, T. Kuruganti, “Model-free control for frequency response support in microgrids utilizing wind turbines,” Electric Power Systems Research, 194, 107080, 2021, https://doi.org/10.1016/j.epsr.2021.107080.
- C. Guo, D. Wang, “Frequency regulation and coordinated control for Complex Wind Power Systems,” Complexity, 1–12, 2019, https://doi.org/10.1155/2019/8525397.
- R. Doherty, A. Mullane, G. Nolan, D. J. Burke, A. Bryson, M. O’Malley, “An assessment of the impact of wind generation on system frequency control,” IEEE Transactions on Power Systems, 25(1), 452–460, 2010, doi: 10.1109/TPWRS.2009.2030348.
- P. Kundur, J. Paserba, V. Ajjarapu, G. Andersson, A. Bose, C. Canizares, N. Hatziargyriou, D. Hill, A. Stankovic, C. Taylor, T. Van Cutsem, V. Vittal, “Definition and Classification of Power System Stability,” IEEE Trans. Power Syst., 19(3), 1387–1401, 2004, doi: 10.1109/TPWRS.2004.825981.
- P. Fernández-Bustamante, O. Barambones, I. Calvo, C. Napole, M. Derbeli, “Provision of frequency response from Wind Farms: A Review,” Energies, 14(20), 6689, 2021, https://doi.org/10.3390/en14206689.
- P. Kundur, N.J. Balu, M.G. Lauby, Power system stability and control, McGraw-Hill. 1994.
- J.F. Manwell, J.G. McGowan, A.L. Rogers, Wind Energy Explained: Theory, Design and Application, Wiley: Hoboken, NJ, USA, 2010.
- S. Bashetty, J.I. Guillamon, S.S. Mutnuri, S. Ozcelik, “Design of a robust adaptive controller for the pitch and torque control of wind turbines,” Energies, 13(5), 1195, 2020, https://doi.org/10.3390/en13051195.
- D. Yang, E. Jin, J. You, L. Hua, “Dynamic Frequency Support from a DFIG-Based Wind Turbine Generator via Virtual Inertia Control,” Appl. Sci., 10(10), 3376, 2020, https://doi.org/10.3390/app10103376.