Development of an Intelligent Road Anomaly Detection System for Autonomous Vehicles
 , Ayomide Ibrahim Suleiman 1, Jibril Abdullahi Bala 1, Ahmad Abubakar Sadiq 2, Taliha Abiodun Folorunso 1, Julia Eichie 3, Adeyinka Peace Adedigba 1, Abiodun Musa Aibinu 1
, Ayomide Ibrahim Suleiman 1, Jibril Abdullahi Bala 1, Ahmad Abubakar Sadiq 2, Taliha Abiodun Folorunso 1, Julia Eichie 3, Adeyinka Peace Adedigba 1, Abiodun Musa Aibinu 1
Adv. Sci. Technol. Eng. Syst. J. 8(2), 1–13 (2023);
 DOI: 10.25046/aj080201
DOI: 10.25046/aj080201
Globally, road transportation has become one of the most reliable means of moving goods and services from one place to the other. It has contributed immensely to the standard of living and modern civilization. However, this means of transportation is characterised by some issues which are poised to be harmful to the human population if not properly addressed. One of such issues is the presence of potholes, bumps, and other road anomalies. Unfortunately, the late identification of road anomalies (Speedbumps and Potholes) and the inability of drivers to detect and slow down while approaching such road anomalies has also been a big challenge faced by many nations. Therefore, there is a need for an automatic and intelligent approaches to be built into vehicles to mitigate the number of road accidents caused by these anomalies. In this work, the development of an intelligent road anomaly identification and manoeuvring system for autonomous vehicle is presented. The developed system focuses on the detection of road anomalies specifically speedbumps and potholes; and the regulation of the vehicular speed when these anomalies are detected. A modified Histogram Oriented Gradient (HOG) and Fuzzy Logic Control (FLC) have been proposed in this work. Furthermore, promising results have been obtained and presented which depicts the proposed HOG algorithm outweigh other techniques in the identification and detection of speedbumps and potholes. In addition, the developed FLC was able to regulate the speed of the vehicle in the presence of speedbumps as well as navigate the vehicle accordingly in the presence of potholes.
1. Introduction
Road travel has facilitated the flow of goods and services in both developed and emerging countries, increased the quality of living, and has also led to global economic development. This goods and service distribution medium has now become one of the most important element of human society and may be one of the most dangerous elements for the human race if adequate steps are not enforced [1].
As since the advent of automobiles and other road vessels, traffic collisions have become the cumulative consequence of the adverse externalities of public transport [2]. Road accidents occur worldwide but are more frequent in dev eloping countries, triggered by over-speeding, traffic indifference, unfavorable weather, lack of vehicle maintenance and bad road conditions [2]. Some of such events are caused by human negligence or an unexpected natural phenomenon, which may be stopped with the correct precautionary measure. According to the World Health Organization (WHO), bad road conditions, especially in Nigeria, are the most unpredictable and the most prevalent cause of road accidents, and for every 100,000 vehicles accident, there are 1042 deaths worldwide in a year [3]. Another report found that in 2009 the annual road traffic fatality figure in Nigeria was 5,000. Poor roads condition and anomalies were the key contributors to these numbers, forcing drivers to swerve or loss control, which place them, and other road users at risk [3].
A study between the years 2000 and 2004 shows that about 36,000 Nigerians died and 125,000 were injured as a result of road crashes, increasing the death rate from traffic injuries in Nigeria as compared to other countries worldwide [4]. These accidents are usually caused by several factors such as inexperience, congestion, intoxication, intersection bottlenecks, distraction, drowsiness, and over speeding in the presence of road anomaly (Speedbumps and Potholes) [5] [6]. Speed bumps are structures that are built on the highways to limit traffic travel speeds in sensitive road areas, such as hospitals and schools [7], while a pothole is a bowl shaped deformity on a road surface that ranges from 150mm and above [8]. There are different types and sizes of potholes and they have harmful effects on pedestrians and cars regardless of their type or style. These road conditions account for damages to vehicles parts and causes drivers to lose control of their cars as they drive past them, which can result in a fetal road accident. Hence, the use of an advanced driver assistance systems (as found in autonomous vehicles) for the precise and timely identification of these anomalies would be idea to reduce and mitigate road accidents in developed and developing countries. Furthermore, this inclusion would also help provide driver with adequate information to aid navigation and speed control. [9].
Autonomous vehicles can be described as vehicles that that autonomously drives to the desired location without requiring any manual control [10]. Autonomous vehicles also have the capability to sense their surroundings and navigate around without the help of an external factor when subjected to different terrains [11]. The concept of autonomous vehicle (AV) involves computer vision (Perception), map navigation (Localization and Planning) and control integration. Each of these concepts must be present to ensure a vehicle is completely autonomous [12]. Regardless of the wide range of usage and nature of AV, human performance has proven to be reliable in driving ground vehicles, for instance, when overtaking another vehicle [13]. The implementation of computer vision and image recognition is very critical in facilitating proper object detection and self-navigation.
The application of computer vision is critically important in the development of AV as it is required for the acquistion of images of road and environment for ease of navigation and protection and safety of users [1]. Generally, computer vision provides machines with the functionality and ability to detect,analyse, interpret and comprehend videos and image information using techniques such as gradient, neutral network and edge detection [14]. Mostly, the technique involves viewing images as a two-dimensional signal, and then applying the traditional technique of image processing. When combined with an embedded device, highly efficient, low memory and robust solutions can be obtained [1]. In recent times, self-driving has been a topic of wide interest for Artificial Intelligence and the Automotive Industries. The irregularity detection on the road surface is a task with great challenges. In developing countries, it is very common to find un-marked speedbumps on road surfaces, which reduces the security and stability of self-driving cars [15]. In AVs, speedbump detection and other road anomalies can be achieved by using a number of techniques one of such is the use of mulitple cameras and microcontroller systems [16].
Some of the major limitations observed in the design and development of autonomous vehicle are blurriness and ineffectiveness in the detection of anomalies, as well as an absent or unsuitable control mechanism for vehicles to move over or around such anomalies. Therefore, the development of an intelligent road anomaly detection system, speed control and maneuvering system for autonomous vehicles is presented in this paper. The system analyses images of the surface of the road using image processing techniques (HOG and BRISK Features) for the detection of road anomalies (Speedbumps and potholes). The use of Fuzzy Logic Controller is used to regulate the speed and also the direction of the vehicle in the presence of r road anomalies (speedbumps and potholes).
In 2010, the number of vehicles used worldwide was estimated to be over 1 billion, and according to [17], AVs are widely anticipated to alleviate road congestion through higher throughput, and also reduce human errors to improve road safety and ease the stress of driving. Also, in [18], a review of previous work done on the effect of Artificial Intelligence on AVs was carried out. The use of intelligent transportation systems and artificial intelligence was employed in the improvement of the working of an autonomous vehicle, which was aimed at decreasing the possible error which can be encountered in AV development. The use of an artificial intelligence approach was used to show the possible setbacks in autonomous vehicles and an effective method using artificial intelligence in solving most of the problems in the autonomous vehicle was also proposed. This approach was proven to be possible and achievable with a low failure rate than the conventional approach used in other works reviewed. Although the algorithm employed in the development and improvement of an AV was effective, it was also time-consuming, difficult and ambiguous in development and implementation.
The remainder of this paper is organized as follows. Section 2 presents a review of related past works with respect to the identification of speedbumps and road anomalies specifically potholes. Also, presented in this section is the summary of the findings and gaps in the reviewed literatures. In section 3, the detailed methodology adopted for the research is presented with emphasis on the mathematical modelling of Avs, the Identification and detection of road anomalies using computer vision and AI. The technique for the speed control and navigation of the AV using fuzzy logic control system is also presented in this section. Section 4, presents and discusses the results obtained from the implementation of the proposed methodology as well as the performance evaluation of the methodology vis-à-vis standard metrics of evaluation. Section 4 presents the summary of findings, conclusion of the work and further research opportunities.
2. Literature Review
2.1. Related works in Pothole Detection
There exists in literature several works in the area of pothole identification and avoidance. In [19] the development of an image-based pothole detection system for intelligent transport system (ITS) service and road management system was proposed. In this work, , a pothole detection method based on two-dimensional (2D) images was proposed for improving the existing method and to be applied to ITS service and road management systems. The use of Modified Histogram Shaped-Based Thresholding (MHST) improved the accuracy of the system to 73% and the precision to 80%. However, the system exhibited a long image processing time (46s average), which limits the practical application of the approach. Furthermore, the vibration of the vehicle also has effect on affects the detection unit of the proposed system
In addition, [20] developed a real-time pothole detection and road monitoring system. The work introduces a system to detect the potholes and informs the concerned authority about the pothole. The proposed system used an ultrasonic sensors and accelerometers to measure the depth of the pothole and jerking respectively. The system captures the geographical location of potholes using a Geograhic Position System (GPS) module. The acquired information is also stored in a cloud database. This serves as a valuable source of information to the vehicle drivers and Government authorities, through a web server with public access. The proposed system provides precautionary measures that can be taken to evade accidents. However, due to the placement of the Ultrasonic sensors, the system is unable to detect a pothole before the vehicle goes over it.
Furthermore, [21] implemented an android based pothole detection system using ultrasonic sensors. The system makes use of an integrated mobile app with the pothole detection system (Ultrasonic Sensor and Microcontroller) for monitoring the road path and anomalies. The system helps users monitor road paths and associated anomalies remotely with the aid of the mobile app. However, the system is limited in its capability to detected all types of road anomalies due to shortcomings of the ultrasonic sensors used. Another limitation of the proposed system is the quality of service of the internet/ communication network.
In a related development, [21] designed a real-time pothole detection technique using image processing and dimension estimation. The proposed system uses image processing and edge detection (Canny, Zero Cross) techniques identify and detect potholes in realtime. The proposed methodology ensures the estimation of the depth and width of potholes for the purpose of remediation such as filling and patching. The system applies a high level of image processing, filtering of images and application of scaling factors to accurately determine and calculate the area of the potholes.
Similarly, [22] designed an automatic pothole detection system using laser technology. The system captures the geographical location coordinates of the potholes and humps.. The developed system effectively detects humps and potholes without any huma intervention before the vehicle actually hits the potholes or the humps. With the use of laser technology, the system can calculate the distance between vehicles and potholes faster than an Ultrasonic Sensor. A major limitation of this system, however, is that it does not possess the ability to control the vehicles when maneuvering potholes.
In , [23] an intelligent system for pothole and hump identification on roads using Internet of Things (IoT) was proposed. The proposition makes use of a database to keep records of identified potholes and also sends the data to the appropriate authorities. The system is also capable of alerting the driver of a pothole ahead so that the vehicle maneuver or slowed down accordingly. However, the system does not assist the driver maneuvering potholes but only detects the potholes.
2.2. Related works in Speedbump Detection
There also exist a number of works in the literature as it relates to speedbumps . In 2010, the number of vehicles used worldwide was estimated to be over 1 billion, and according to [24], AVs are widely anticipated to alleviate road congestion through higher throughput, and also reduce human errors to improve road safety and ease the stress of driving.
In [25], a survey on possible production errors and security challenges faced by Autonomous Vehicles was carried out. The use of road segmented remedy, intersection-based solution, active & passive countermeasure was employed in carrying out the survey on possible production error and security challenges faced in autonomous vehicles.
In a related development a road surface condition monitoring and database system with the aid of a programmed accelerometer sensor was proposed by [26]. The system identifies different road conditions with the aid of vehicular vibrations due to their acceleration on road anomalies.. The proposed approach was reliable, durable and not time-consuming which makes it suitable for the development of road monitoring systems. The proposed approach offers a reliable and fast medium for the detection of road surface profiles. In the system acquired profiles are stored to form a roboust database for future references. Regardless of the benefit the system offers, the mechanism for the protection of the stored data on the database was not provided which pose a security risk to user data and this limits the application in AV systems as reagrds vehicle to vehicle communication [26].
Also, a smartphone road anomaly detection system was proposed and developed in [27]. The proposed system adopted a modified fuzzy logic guassian model for analysing and classification of road anomalies. The developed system employed a K-nearest neighbour (KNN) algorithm to classify the sensed anomalies into Potholes and Bumps. The proposed system demonstrated versatility, effectiveness with a 94% to 96% accuracy rate in the recognition of road anomaly and compatiblilty with different types of vehicles and its low cost-effectiveness. Regardless of the effectiveness, versatility and accuracy of the technique used in the recognition of road conditions, the technique is only applicable to only two types of road conditions namely potholes and bumps[27].
[13], proposed the use of a fuzzy logic controller for the development of a vision and control system for autonomous vehicles. The fuzzy logic controller comprises a steering controller and a speed controller. One of the added advantages of this method was its ability to add human knowledge and experience via the fuzzy decision tree language into the system to achieve higher accuracy and precision. Although the method is capable of performing automatic driving on straight roads, the scheme is challenging to implement in AV development [13].
The image processing was used in the development of a speed breaker and road marking detection system in [28]. The technique involved using image processing for speed breaker and road marking detection. The authors also integrated Optical character recognition and Hough transform alogrithms to recognize traffic signs and detect line markings respectively. An accuracy rate of 79.97% for optical character recognition and 100% for the local binary patterns was obtained after analysis. One of the limitation of the system was the inability to detect speed breaker and road marking in the absence of light which made the system not fully functional at night.
2.3. Summary of findings and research gaps
In the light of the above, it is evident the application of image processing and computer vision have aided the identification and detection of road anomalies on motorways. Albeit, the blurriness of the road anomalies images as identified from the perspective of the moving vehicle and the inability to regulate the speed of vehicle when approaching anomalies are another issues. These and other issues identified in literature have resulted in the ineffectiveness of developed solution. Thus, to proffer solutions to these challenges, this work proposes the development of a improved Histogram of Oriented Gradient (HOG) image processing algorithm to detect road anomalies as well as estimate their locations. Furthermore, to control the speed and effectively navigate AVs, this work proposes the adoption of a modified fuzzy logic controller to regulate the speed of a vehicle when approaching a road anomaly. Table 1 shows some of the related work carried out in autonomous vehicle and pothole detection.
Table 1: Related works on Pothole and Autonomous vehicle
| S/N | Author(s) | Work | Year | Description | Strength(s) | Weakness(es) |
| 1 | Seung-ki, R., Taehyeong, K. & Young-RO, K. | Image-Based Pothole Detection System for ITS Service and Road Management System. | 2015 | ITS (Intelligent Transportation System) service and road management system. A pothole detection method based on two dimensional (2D) images is proposed for improving the existing method and designing a pothole detection system to be applied to ITS service and road management system. | The use of a Modified Histogram Shaped-Based Thresholding (MHST) improved the Accuracy to 73% and Precision of 80%. | Long image processing time (46s average), accuracy can be improved with the use of more than one optical sensor, the vibration of vehicle affects the detection unit. |
| 2 | Ashwini, K., Kore, K., Akshada, K., & Ashwini, M. | Pothole Detection System Based on Android Device and Ultrasonic Sensor. | 2018 | The system makes use of an integrated mobile app with the pothole detection system (Ultrasonic Sensor and Microcontroller) for monitoring of the road path. | the mobile app helps the users monitor the road path remotely. | The use of just an ultrasonic sensor causes the system to be inefficient in detecting all forms of potholes.
The system would be ineffective where there is poor or no network reception. |
| 3 | Rahul, H., Ashish, Z., & Nilesh, P. | Real time pothole detection technique using image processing and dimension estimation. | 2019 | The proposed system uses image processing and edge detection (Canny, Zero Cross) techniques to take real time data of potholes.
It uses this data to estimate the depth and width of potholes for filling and patching purposes. |
The system applies high level of image processing, filtering of images and application of scaling factors to accurately calculate the area of the pothole. | The processing time of the system will be relatively slow when applied to self driving cars for pothole detection due to the fact that self driving cars need only fast estimations of the pothole perimeters and not the depth. |
| 4 | Shivaleelavathi, B. G., Veeramma, Y., Yamini, V. S., & Spoorthi, T. | Design and Development of an Intelligent System for Pothole and Hump Identification on Roads. | 2019 | This project aims at identifying the potholes using image processing technology with the help of a camera. The system sends the location of these potholes to authorities using GPS. The humps are detected using the ultrasonic sensors and the electronics system alerts the driver about the humps and the driver can accordingly slow down the vehicle and hence avoid the accidents. The alert is provided in the form of voice through speakers and displayed on the LCD and using GSM, SMS is sent to the driver. | The system makes use of an IOT database to keep records of identified potholes and also sends the data to the appropriate authorities.
The system is also capable of alerting the driver of a pothole ahead so that the vehicle can be manoeuvred or slowed down accordingly. |
The system does not assist the driver manoeuvring potholes but only detect the potholes. |
| 5 | Youngtae, J., & Seungki, R. | Enhanced Pothole Detection Algorithm for Blurry Images. | 2015 | This system comprises of a pothole detection algorithm using various features in 2D images that improved the existing methods and accurately detected a pothole. The System implemented the use of image sharpening algorithms to prevent wrong detection of potholes. | The major strength of this system is the ability of the system to be accurate enough to detect real potholes on the road with the aid of a de-Blurring image sharpening algorithm. | There is a little the system can do if the image blur is caused by vibrations or shake in the camera. The restoration rate in situations like this is still very low. |
| 6 | Akshatha, P. , Chaitra, P. , Lakshmi, S. , & Richard, L.P. | Automatic Detection of Potholes | 2019 | Automatic detection of potholes is a human safety based project. This system provides cost effective solution for detection of potholes on the road by using ultrasonic sensors. The microcontroller fetches the location of the pothole using GPS and the GPS locations are sent with the help of GSM. The GSM at the vehicle part takes that location and sends the location to the concerned person and that person can see pothole on the map of that area. | This system provides cost effective solution for detection of potholes and humps on the road and indicate the road maintenance authority for maintenance. This system also provides the driver an indication that there is a pothole ahead and the desired action can be taken | The system does not possess the ability aid the vehicle in control.
The alert system does not provide exact location of pothole on the road path to aid avoidance of the pothole. |
3. Research Methodology
3.1. System Description
The design and development of the speedbump detection and speed control system for an autonomous vehicle involve numerous components. These components include Raspberry pi 3 microprocessor, speed sensor (LM 390), Pi camera, Model Car, Direct Current (DC) motors, servo motor, power supply.. The Raspberry pi microcontroller is the brain of the system. The inputs to the microcontroller are the images acquired from the camera as well as the speed of the vehicle at that instant. The outputs of the system are the speed of the DC motor and the angle of the servo motor. These outputsrl indicates the status of the vehicle in terms of speed and direction in the presence of road anomalies (Speedbumps and potholes). The raspberry pi microcontroller carries out all major processing and also houses the HOG and Fuzzy Logic Control algorithms.
When an anomaly is detected, the system will evaluate the distance of the vehicle from the anomaly, based on the data obtained from the camera, the fuzzy logic controller determines the appropriate speed and direction to be used when approaching an anomaly. When the vehicle is close to an anomaly, the speed will be reduced by the controller, and maneuver the vehicles in the appropriate direction. The vehicle will revert to its original speed and position after it has successfully passed the anomaly.
The block diagram representing system architecture is shown in Figure 1 and the flowchart of the system operation is shown in Figure 2.
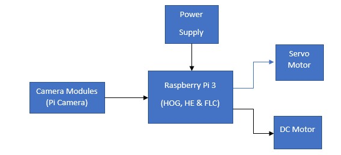
Figure 1: System Architecture
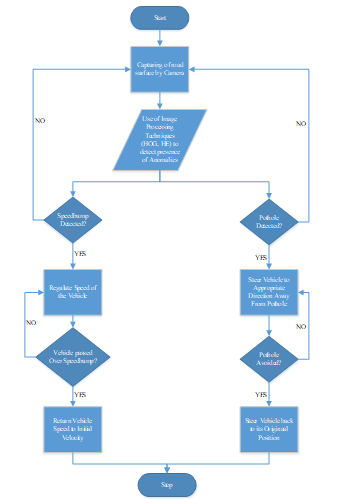
Figure 2: System Flowchart
Figure 2 shows the process of how information is being acquired, gathered, processed, and transmitted from one section of the system to the other. The image of the anomaly (speedbump or pothole) is captured by the camera by extracting the features of the road surface using the histogram of oriented gradient technique and Histogram Equalization respectively. When the road anomaly has been detected, a command is sent to the microcontroller which regulates the speed of the vehicle, when the anomaly is a speedbump, and in the presence of a pothole, a command/ signal is sent to the system to change the direction of the vehicle by changing the angle of the servo motor. When the vehicle has successfully passed or steered passed the anomaly, the speed and the direction of the vehicle is returned to the original velocity and position respectively. This process continues the vehicle is in motion.
In this work, MATLAB software was used for the realization of the vehicle model, development and implementation of the image processing and fuzzy logic algorithms . MATLAB is an acronym for “Matrix Laboratory” which is a high-level programming language and an Integrated Development Environment (IDE) used for numeric computations, simulations and programming. MATLAB is used in different fields for data analysis, algorithm development and the development of system models. It has a vast variety of tools and commands essential to almost all engineering applications.
3.2. Mathematical Model
In this work, the autonomous vehicle was modelled in terms of the longitudinal dynamics of the vehicle. The external longitudinal forces acting on the vehicle include aerodynamic drag forces, gravitational forces, longitudinal tire forces and rolling resistance forces.
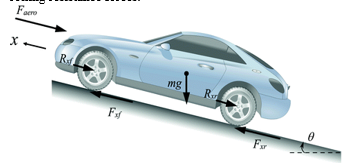
Figure 3: Longitudinal Vehicle Dynamics [29]
Figure 3 shows a diagram representing the longitudinal dynamics of the vehicle. The diagram shown in Figure 3 highlights the forces considered when modelling the longitudinal dynamics of a vehicle. Fxr, Faero, Fxf, Rxf, mg, and Rxr represent the longitudinal tire forces at the rear, aerodynamic drag force, rolling resistive force at front tires, mass of the vehicle, and rolling resistive force at front tires, respectively [29]. The force balance along the vehicle longitudinal axis yield is showed in (1).
![]()
Where:
Fxf = longitudinal tire force at front tire
Fxr = longitudinal force at rear tire
Faero =equivalent longitudinal aerodynamic drag force
Rxf = rolling resistance at front tire
Rxr =rolling resistance at rear tire
m = mass of the vehicle
g = acceleration due to gravity
= angle of inclination of the road the vehicle travels
The aerodynamic drag force on the vehicle can be represented as equation 5.
![]()
Where:
ρ is the mass density of air.
Cd is the aerodynamic drag coefficient.
Af is the frontal area of the vehicle which is the projected area of the vehicle in the direction of travel.
Vx = ẋ is the longitudinal vehicle velocity, Vwind is the wind velocity (positive for a headwind and negative for a tailwind) [29].
3.3. Road Anomaly Detection
- Image Acquisition
This process entails acquiring the image from the surface of the road, which will be used in determining the presence or absence of anomalies by applying image processing techniques. Image processing has become one of the main aspects of automation and safety-related applications in the electronic industries and these images can either be in a digital or analog form [15]. This process of acquiring the image will be carried out using a Pi camera with a resolution of 8 Megapixels, when the vehicle is moving with a speed of 5 to 10 m/s.
- Image Preprocessing (Color space conversion, HE, HOG noise removal)
Images of road surfaces are captured using the Pi camera. The captured images are sent to the microcontroller to carry out image processing to detect and extract both speedbump and pothole features. The next process is done by the microcontroller to convert the image’s colour space from RGB to grayscale, filter all distortion and blurriness using the median filter, crop out the Region of Interest (ROI) of the image, and HOG and HE respectively is applied on the image to enhance the image. The mathematical representation of the histogram equalization (HE) is in (3) and Histogram of Oriented Gradient (HOG) in (4) to (8).
Equation for HE:
![]()
Where:
h = new grayscale value.
v = pixel number.
CDF(v)= Cumulative Density Function at v.
CDFmin = minimum Cumulative Density Function.
M x n = image rows & columns.
L = current grayscale level.
After histogram equalization, a feature extraction process is used to identify features on the image that are relevant to the scope of this project (potholes). This process is done by using the BRISK (Binary Robust Invariant Scalable Key points) points algorithm. The BRISK points represent the metric data on the region of interest with the most significant value. Pothole elements in images have more distinct metric values due to the disparity in pixel contrast compared to the road surface. This process is used to retrieve the location of the strongest metric data representing the pothole features recognized in the segmented image. The point’s locations are then stored in an array.
Equation for HOG:
Using the 1st order differential coefficient, fx (x, y) and fy (x, y)
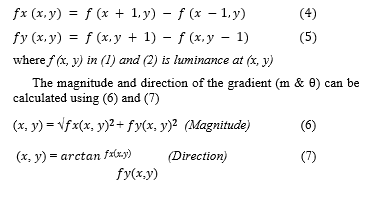
After computation of (6) and (7), the HOG is generated by the following steps:
- determining the class which ?(?, ?) belongs to.
- increasing the value of the class using the first step.
- repeating the above operation for all the gradients belonging to the cell.
Equation (8) can be used in finding the final HOG feature.
![]()
Where = vector corresponding to a combined histogram for a block and V = normalize Vector.
- Image Segmentation
Image segmentation entails the use of Sobel edge detection in identifying the edges present in an image, which is carried out based on the characteristics of the pixels in the image. The Sobel filter works by calculating the gradient of image intensity at each pixel within a given image. From the result gotten from the input of the Pi camera, the edges of the images were obtained by finding the approximate absolute gradient magnitude at each point in the image.
- Feature Extraction (HOG and BRISK)
Feature extraction involves the identification and selection of the desired data from an image, and converting that data obtained into useful information The feature extracted provides the coordinate of the speedbump on the road surface when present with the use of the HOG Technique, while the feature and coordinate of the pothole of are provided using the Brisk points. These features are used in training the system in detecting the presence or absence of road anomalies (Speedbump and Potholes) respectively. During the feature extraction, the HOG points converge around or on the surface of the anomaly (i.e., Speedbump) and also during that of the BRISK points. Equation 9 was used in crrying out the HOG technique.
![]()
- Feature Recognition (ANN, DT, and SVM)
The use of Artificial Neural Network (ANN), Support Vector Machine (SVM) and Decision Tree techniques were applied in training and testing of the designed system in recognizing the presence or absence of road anomaly (speedbump and potholes). The presence and absence of anomalies on the road surface were used as the target in training the system, where the presence of anomalies was represented by an output one (1), and the absence of anomalies was represented as an output zero (0).
3.4. Speed and Steering Control
Fuzzy Logic Design for Steering
Fuzzy Logic is a method from imprecise and ambiguous knowledge, which provides a definite solution. When using a series of statistical rules used to describe expertise dependent on membership degrees, this is achieved. Fuzzy Logic has widespread applications in control engineering, signal processing, and artificial intelligence.
The fundamental type of fuzzy logic control modelling, known as the fuzzy inference system (FIS), is a rule-based structure composed of three conceptual components:
- A rule base composed of a set of fuzzy if-then rules.
- A database describing the membership function (MF) used in these fuzzy rules.
- A reasoning process incorporating such rules into a mapping routine from inputs to the outputs of the system to drive a reasonable output.
There are essentially two types of base rule structures, namely Mamdani and Takagi-Sugeno-Kang (TSK). The fuzzy rule is expressed in language form in the Mamdani type. In this work, the fuzzy rule was represented using the Takagi-Sugeno-Kang rule structure as a logical function of the input variables which is more suitable for neuro-fuzzy systems. The fuzzy logic approach is made up of five steps:
- Define all input and output variables.
- Define the subset interval.
- Choose the membership function.
- Define the IF-THEN rules.
- Perform calculations and adjust the rules.
Due to its simplicity, ease of interpretation, acceptance of imprecise data and ability to integrate with other traditional control methods, this study will employ the use of a Fuzzy Logic Controller. Figure 4 presents a fuzzy logic control system.
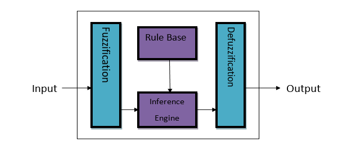
Figure 4: Fuzzy Logic System.
In this work , the steering of the vehicles in the presence of a pothole anomaly is determined by the rule base of the fuzzy system, the rule base is the representation of the IF-AND-THEN rules used in the implementation of the fuzzy controller. These rules are stated below, with the diagram representation shown in Figure 5:
- If (POA is PRESENT) and (DTA is LEFT) then (STEERING is RIGHT)
- If (POA is PRESENT) and (DTA is RIGHT) then (STEERING is LEFT)
- If (POA is ABSENT) then (STEERING is MIDDLE).
where
POA : Presence of Abnormaly
DTA: Distance to Abnormaly
STEERING: Control of vehicle
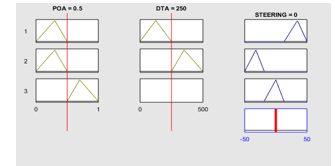
Figure 5: Rule Base for FIS.
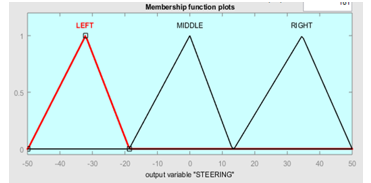
Figure 6: Output Membership Function for Steering.
The fuzzy logic controller uses the output membership function from the FIS in Figure 6 to determine the direction to control the autonomous vehicle in the presence or absence of road anomaly (pothole). The surface diagram describing the fuzzy logic controller’s FIS is shown in Figure 7.
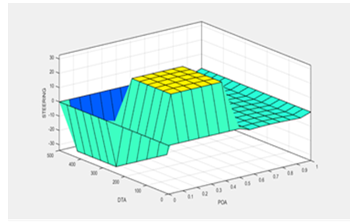
Figure 7: Surface Diagram of Fuzzy Logic Controller
Fuzzy Logic Design for Speed
The use of a surface diagram was employed to represent the relationship between the input and output parameters of the designed FLC system. Figure 8 shows the surface diagram of the design FLC system, by representing the relationship between the input membership parameter to the output membership parameters in a three-dimensional graphical representation, which was generated from the design of the FLC controller.
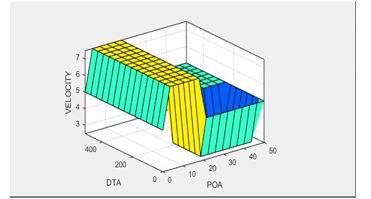
Figure 8: System Surface Diagram
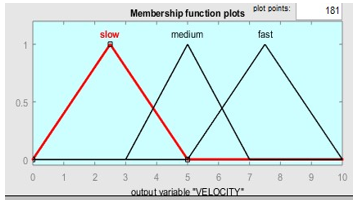
Figure 9: Output Membership Function for Speed Control.
The fuzzy logic controller uses the output membership function from the FIS in Figure 9 to determine the direction to control the autonomous vehicle in the presence or absence of road anomaly (speedbump).
In the design of the FLC system, rules were generated in order to provide the needed condition (rules) on which the FLC depend in controlling the speed of the vehicle in the presence or absence of speedbumps. Table 2 shows the rules generated by FLC in a graphical format. Where
POA : Presence of Anomaly
DOA: Distance of Anomaly
Table 2: FLC Rule Base
| POA
DOA |
Present | Absence |
| Close | Slow | Fast |
| Far | Med | Fast |
3.5. Testing and Performance Evaluation
The performance evaluation of the system is carried out to determine the effectiveness, accuracy, precision and efficiency of the method and techniques used in the development of this project. The intelligent speedbump detection system is tested and evaluated based on precision, recall and accuracy in detecting the presence of speedbumps on the road. The metrics are represented mathematically as:

where:
TP = true positive (number of abnormally classified correctly).
FP = false positive (number of negative cases of abnormally classified correctly).
TN = true negative (number of correct cases of abnormally classified wrongly). FN = false negative (number of incorrect cases of abnormally classified wrongly).
The fuzzy logic model was also evaluated based on the response of the system to the rules generated by the fuzzy inference system in regulating the speed and direction of the vehicle when there is the presence of road anomaly. In carrying out the performance evaluation of the system, the accuracy rate which indicates how well the system was able to correctly detect the positive cases of a speedbump.
4. Results
This section presents the result gotten from the detection of road anomaly, i.e. speedbumps detection system in section 4.1 and that of the pothole detection system in section 4.2 respectively.
4.1. Road Anomaly Detection
a) Speedbump
The results obtained from the development of an intelligent speedbump and speed control system for autonomous vehicle, with the use of the HOG technique is shown in Figure 10. The result was obtained with the implementation of the HOG feature extraction technique in order to extract the needed data from the image acquired by the camera (i.e., speedbump). The feature extracted provides the coordinate of the speedbump on the road surface when present, and it’s also used in training the system in detecting the presence or absence of road anomaly. During the feature extraction, the HOG points converge around or on the surface of the anomaly (i.e., Speedbump).
The use of Artificial Neural Networks (ANN) and Decision Tree techniques was applied in training and testing of the designed system in recognizing the presence or absence of road anomaly (speedbump). The results obtained from the training the system with the use of ANN and Decision Tree are presented in Figure 11 to Figure 14.
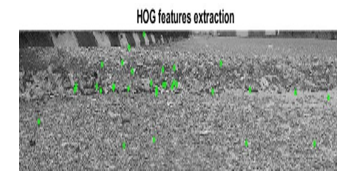
Figure 10: Feature Extraction using HOG
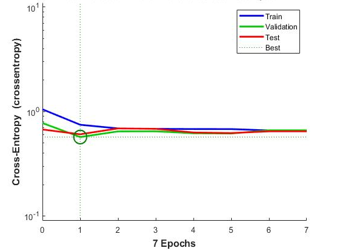
Figure 11: Performance Validation of System (ANN)
From Figure 11, it is shown that the best performance of the trained model occurred at a value of 0.56976 before the occurrence of overfitting at 7 Epochs. The confusion matrix of the system in Figure 12 presents the result in the detection of an anomaly. The confusion matrix shows that the system had a testing performance of 58.4%, a training performance of 71.4%, a validation performance of 71.4% and total performance of 62.3% for the detecting of speedbumps on road surfaces.

Figure 12: Confusion Matrix of Neural Network
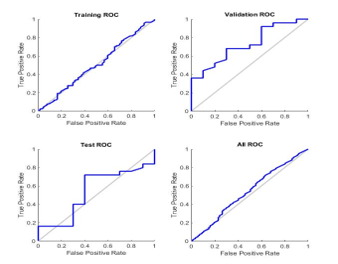
Figure 13: Receiver Operation Characteristics of Neural Network
The evaluation of the result between the output of the model to the true positive rate and false positive rate in the classification of the data. From the ROC shown in Figure 13, the system had a higher True Positive Ratio compared to the False Negative Ratio in the validation, training and testing ratio graph in the detection speedbump.
Figure 14 presents a graphical representation of the output gotten from the application of training the system with the use of a classification learner (Decision Tree). The Classifier was also provided with a dataset containing 231 road images (144 images with speedbump and 87 images without speedbump). The Decision tree classifier was also trained with 144 features extracted from the images and had an accuracy of 75.7%.
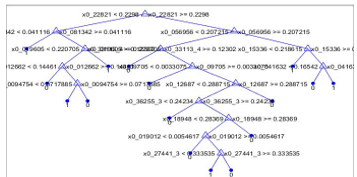
Figure 14: Classification Tree Model for Decision Tree for Speedbump
b) Pothole
The results obtained from the image processing algorithm, image acquisition, image preprocessing using Histogram Equalization, and feature extraction are shown in Figure 15.

Figure 15: BRISK Points Extracted from the Image.
4.2. Vehicle Maneuvering
This section presents the result gotten from the design of the fuzzy logic system in the steering and speed control of the vehicle. The result of the steering fuzzy system is shown in section 4a and the speed control is in section 4b.
a) Steering
Table 3 presents the extracted points from the image. these points will be fed into the feature recognition (ANN) model to predict if a pothole is present in the image.
Table 3: Brisk Points Location
| BRISK POINT | X AXIS | Y AXIS |
| 1 | 404.0000 | 269.0000 |
| 2 | 287.3419 | 337.0000 |
| 3 | 258.8189 | 324.8189 |
| 4 | 305.3646 | 314.9544 |
| 5 | 416.9694 | 275.9694 |
| 6 | 328.2500 | 370.0000 |
| 7 | 256.0000 | 329.0000 |
| 8 | 261.0000 | 317.2109 |
| 9 | 256.4589 | 274.0000 |
Table 4: Fuzzy Logic Controller Performance results
| Presence of anomaly (POA) (Meter) | Distance to Anomaly (DTA) (Meter) | Output (Velocity)
(M/s) |
Accuracy | Remark |
| 0.1 | 0 | 1 | Accurate | Slow Velocity |
| 0.2 | 20 | 2 | Inaccurate | Fast Velocity |
| 0.3 | 40 | 3 | Accurate | Slow Velocity |
| 0.4 | 60 | 4 | Accurate | Medium Velocity |
| 0.5 | 80 | 5 | Accurate | Medium Velocity |
| 0.6 | 100 | 6 | Inaccurate | Fast Velocity |
| 0.7 | 120 | 7 | Accurate | Slow Velocity |
| 0.8 | 140 | 8 | Accurate | Fast Velocity |
| 0.9 | 160 | 9 | Inaccurate | Fast Velocity |
| 1 | 180 | 10 | Accurate | Fast Velocity |
| 2 | 200 | 10 | Accurate | Fast Velocity |
| 3 | 220 | 6 | Inaccurate | Slow Velocity |
| 4 | 240 | 4 | Inaccurate | Slow Velocity |
| 5 | 260 | 7 | Accurate | Fast Velocity |
| 6 | 280 | 10 | Accurate | Fast Velocity |
| 7 | 300 | 10 | Accurate | Fast Velocity |
| 8 | 320 | 8 | Inaccurate | Slow Velocity |
| 9 | 340 | 10 | Accurate | Fast Velocity |
| 10 | 360 | 9 | Inaccurate | Medium Velocity |
| 11 | 380 | 10 | Accurate | Fast Velocity |
b) Speed
The Fuzzy Logic Controller was used in the control of the vehicle speed in the presence of a speedbump, this was also carried out using a maximum velocity of 10M/s in controlling the speed of the vehicle. The presence the distance of the speedbump was used in the determination of the velocity at the vehicle moves at. Table 4 present the response of the FLC in regulating the speed of the vehicle in relation to the presence and distance of rod anomaly (speedbump) to the vehicle.
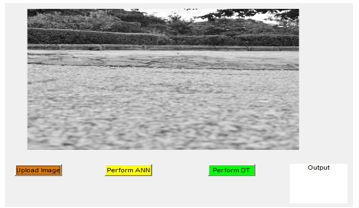
Figure 16: Developed MATLAB Application for Speedbump Analysis on Images.
- Testing and Performance Analysis
Developed Application Interface
The feature recognition system was evaluated by developing a GUI application in testing the detection accuracy of the ANN model to that of the Decision Tree model and the SVM for both speedbump and pothole anomaly as shown in Figure 16 and Figure 17 respectively. Also, the results obtained from the ANN, SVM and Decision Tree model displayed on the MATLAB application used for the image analysis are shown in Figure 16.
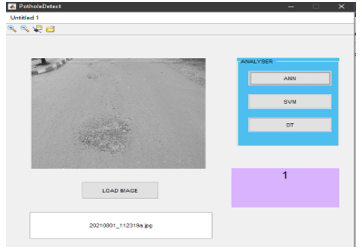
Figure 17: Developed MATLAB Application for Pothole Analysis on Images.
From the results presented in the application in Figure 17, an output of 1 was achieved signifying that an anomaly (pothole) is present in the image.
- Comparative Analysis
The ANN, SVM and DT models’ performance was evaluated based on accuracy, precision and sensitivity using Equations (9), (10), and (11). The evaluated performances are shown in Table 4 and Table 5 for both speedbump and pothole respectively.
After the two models have been designed, trained and tested, a comparison between both techniques was carried out, based on the accuracy, recall and precision of their results. Table 2 shows the comparative analysis between the ANN and Decision Tree models. The Precision, Accuracy and Recall of both trained models were calculated using (9), (10) and (11). The aim of the result shown in Table 5, is to determine the most optimal and suitable prediction technique for detecting speedbumps on the road surface. From Table 5, it was seen that the Decision Tree model produces a higher accuracy, precision and recall, with a percentage of 75%, 82% and 77% respectively.
Table 5: Comparison Table of ANN and Decision Tree
| Parameters/ Technique | Artificial Neural Network (ANN) | Decision Tree |
| Accuracy | 62.3% | 75.7% |
| Precision | 70% | 82% |
| Recall | 61% | 77% |
From the comparison in Table 6, the SVM model provided the best performance in terms of accuracy and precision. While the ANN and Decision Tree models produced similar but optimal performances in accuracy and precision which were over 75%.
Table 6: Performance Evaluation for ANN, SVM AND DT models.
| Accuracy (%) | Precision (%) | Sensitivity (%) | |
| ANN | 78.6 | 78.6 | 78.6 |
| SVM | 86.0 | 86.7 | 79.4 |
| Decision Tree | 78.5 | 76.4 | 71.75 |
5. Conclusion
The result of the HOG ANN training model used for recognizing the presence or absence of speedbump had an accuracy of 62.3%, a precision of 0.70 and a recall of 0.61, while that of the decision tree had an accuracy of 75.7%, a precision of 0.82 and a recall value of 0.77 as shown in Table 3. The results of the HE image processing model and ANN training model showed good accuracy of 83.3% for the sample images used for testing as shown in table 5, but the model was unable to detect the presence of anomalies in low-resolution images as the algorithm could not plot 9 BRISK points on images that had low pixel quality. The trained ANN model provided a total accuracy of 78.6%.
The fuzzy logic controller was able to regulate the speed of the vehicle in the presence of a speedbump and also change the direction of the vehicle in the presence of potholes. It was also observed that the use of the decision classification tree approach in detecting speedbump detection provided more accurate results when compared to that of Artificial Neural Network (ANN) with an accuracy of 65% in testing and training of the system, while the SVM models in the detection of potholes provided the best performance in pothole detection, but the ANN model provided an optimal performance for pothole detection with an accuracy of 78.6%.
Conflict of Interest
The authors declare no conflict of interest.
Acknowledgement
The authors wish to acknowledge the Tertiary Education Trust Fund (TETFUND), Nigeria for funding this work under the National Research Fund (NRF) grant titled “Novel Road Accident Monitoring and Prevention System for Nigerian Roads and Highways” with Grant Number: TETF/ES/DR&D-CE/NRF2020/SETI/95/VOL1.
- P. U. Miracle, J. A. Bala, A. M. Aibinu, T.A. Folorunso, “Intelligent Speed Bump Identification and Speed Control System for Autonomous Vehicles: A Conceptual Design,” 1st International Conference on Multidisciplinary Engineering and Applied Science (ICMEAS), 2021, pp. 1-6, doi: 10.1109/ICMEAS52683.2021.9692403.
- J.A. Afolabi, K.T. Gbadamosi, (2017). “Road Traffic Crashes in Nigeria: Causes and Consequences.” Transport & Logistics: The International Journal, 17(42), 41.
- N.C. Onyemachi, U.R. Ofoma, “The Public Health Threat of Road Traffic Accidents in Nigeria: A Call to Action.” Annals of Medical and Health Science Research, 6(4), pp. 199-204, 2016, doi: 10.4103/amhsr.amhsr_452_15.
- G.F. Pepple, C.S. Ejimadu, “Relationship between Road Traffic Accidents and Visual Status of Commercial Motor Vehicle Drivers in an Urban Area of Niger Delta Region of Nigeria.” Ophthalmology Research: An International Journal, 1-7, 2019.
- M. Bashiri, C.H. Fleming, “A platoon-based intersection management system for autonomous vehicles.” In IEEE Intelligent Vehicles Symposium, Proceedings (Vol. IV, pp. 667–672). Redondo Beach, CA, USA, 2017. https://doi.org/10.1109/IVS.2017.7995794
- W. Zhang, E. Jenelius, H. Badia, “Efficiency of semi-autonomous and fully autonomous bus services in trunk-and-branches networks.” Journal of Advanced. Transportation, 2019. https://doi.org/10.1155/2019/7648735
- S. Adarsh, Real-Time Speed Bump Detection Using Image Segmentation for Autonomous Vehicles. Intelligent Computing, Information and Control System (ICICCS). 1039, 308, 2019.
- J. Youngtae, R. Seungki, “Enhanced Pothole Detection Algorithm for Blurry Images.” Journal of Emerging Trends in Computing and Information Sciences, 6 (5), 245, 2015.
- H.S. Yun, T.H. Kim, T.H. Park, “SpeedBump Detection for Autonomous Vehicles by Lidar and Camera.” Journal of Electrical Engineering & Technology, 14(5), 2155-2162, 2019. https://doi.org/10.1007/s42835-019-00225-7.
- H.S. Yun, T.H.. Kim, T.H. Park, “Speed-Bump Detection for Autonomous Vehicles by Lidar and Camera.” Journal of Electrical Engineering & Technology, 14(5), 2155- 2162, 2019, https://doi.org/10.1007/s42835-019-00225-7.
- H. Bello-Salau, A.M. Aibinu, A.J. Onumanyi, S. Ahunsi, E.N. Onwuka, J.J. Dukiya, “Development of a road surface condition monitoring and database system.” In 2nd International Conference on Information and Communication Technology and Its Applications (ICTA 2018), Federal University of Technology, Minna, Nigeria (p. 6), 2018.
- A.B. Saeed, Madjid, T, “Autonomous Vehicles: Challenges, Opportunities and Implications.” Journal on Modern Transportation, 24(8), 287, 2016, https://doi.org/10.1007/s40534-016-0117-3.
- U. Anand, “Fuzzy logic vision and control of autonomous vehicles.” IPASJ Int. J. Comput. Sci, 4(1), 1-7, 2016.
- J.A. Bala, S.A. Adeshina, A.M. Aibinu, “Advances in Road Feature Detection and Vehicle Control Schemes: a Review,” 2021 1st International Conference on Multidisciplinary Engineering and Applied Science (ICMEAS), 2021, pp. 1-6, doi: 10.1109/ICMEAS52683.2021.9692414.
- L.B. Ana, O. Ivan, O.J. Arturo, “Speedbump Detection on Roads using Artificial Vision.” Research in Computer Science, 148(9),71-82, 2019.
- Y. Hyeong-Seok, K. Tae-Hyeong, P. Tae-Hyoung, ”Autonomous Vehicle by Lidar and Camera.” Journal of Electrical Engineering & Technology, 14(5), 2155-2162, 2019, https://doi.org/10.1007/s42835-019-00225-7.
- H. Ziaul, “Basic Concept of GPS and Its Applications.” IOSR Journal of Humanities and Social Science, 21(3), 31, 2016.
- R. Seung-ki, K. Taehyeong, K. Young-RO, “Image-Based Pothole Detection System for ITS Service and Road Management System.” Journal of Mathematical Problems in Engineering, 20(15), 1-11, 2015, https://doi.org/10.1155/2015/968361.
- T. Amitha, J. Shiji, V. Sinu, P. Sooraj, N. Indrasena, “Real Time Pothole Detection and Road Monitoring System.” International Journal of Innovative Research in Science, Engineering and Technology, 8(6), 6740-6744, 2019.
- K. Ashwini, K. Kore, K. Akshada, M. Ashwini, “Pothole Detection System Based on Android Device and Ultrasonic Sensor.” International Journal of Innovative Research in Computer and Communication Engineering, 6(9), 7688-7692, 2018.
- H. Rahul, Z. Ashish, P. Nilesh, “Real time pothole detection technique using image processing and dimension estimation.” International Journal of Engineering Development and Research, 7(2), 108-111, 2019.
- S. Yamuna, S. Raja, M. Pavithra, M. Ranjitha, R. Shubashni, S. Sneha, “Automatic Pothole Detection System using Laser Technology.” International Journal for Research in Applied Science & Engineering Technology (IJRASET), 5(3), 1226-1231, 2017.
- Y. Wiseman, Autonomous Vehicles. Encyclopaedia of organizational knowledge, Administration, and Technologies, First Edition 2019.
- S.D. Pendleton, H. Andersen, X. Du, X. Shen, M. Meghjani, Y.H. Eng., M.H. Ang, “Perception, planning, control, and coordination for autonomous vehicles.” Machines, 5(1), 6, 2017, https://doi.org/10.3390/machines5010006 .
- J. Cui, L. S. Liew, G. Sabaliauskaite, F. Zhou, “A review on safety failures, security attacks, and available countermeasures for autonomous vehicles.” Ad Hoc Networks, 90, 101823, 2019, https://doi.org/10.1016/j.adhoc.2018.12.006.
- A.M. Nascimento et al., “A Systematic Literature Review About the Impact of Artificial Intelligence on Autonomous Vehicle Safety,” in IEEE Transactions on Intelligent Transportation Systems, vol. 21, no. 12, pp. 4928-4946, Dec. 2020, doi: 10.1109/TITS.2019.2949915.
- R. Du, G. Qiu, K. Gao, L. Hu, L. Liu, “Abnormal Road Surface Recognition Based on Smartphone Acceleration Sensor.” Sensors, 20(2), 451, 2020, https://doi.org/10.3390/s20020451.
- O. Adeyemi, M. Irhebhude, A. Kolawole, “Speed Breakers, Road Marking Detection and Recognition Using Image Processing Techniques.” Advances in Image and Video Processing, 7(5), 30-42, 2019.
- R. Rajamani, Vehicle dynamics and control. Springer Science & Business Media, 2011.