Real Time and Post-Processing Flight Inspection by Drone: A Review
Volume 6, Issue 3, Page No 92-99, 2021
Author’s Name: Sékou Togola, Sountongnoma Martial Anicet Kiemdea), Ahmed Dooguy Kora
View Affiliations
e-Inov laboratory, Ecole Supérieure Multinationale des Télécommunications de Dakar, Dakar, 10000, Sénégal
a)Author to whom correspondence should be addressed. E-mail: kiemde.anicet97@gmail.com
Adv. Sci. Technol. Eng. Syst. J. 6(3), 92-99 (2021); ![]() DOI: 10.25046/aj060310
DOI: 10.25046/aj060310
Keywords: Drone, Flight inspection, NAVAIDs

Export Citations
Air Navigation Aids (NAVAIDs) whether implemented on the ground or in space and the Precision Approach Path Indicator (PAPI) system need to be checked in flight to ensure compliance with the standards set by International Civil Aviation Organization (ICAO). This activity has been carried out for decades by conventional aircraft and is usually done at low altitude around airports. This makes the task very dangerous and costly in terms of human lives. The use of Unmanned Aerial Vehicle (UAVs) or Drone to provide flight inspection and to progressively replace conventional aircraft through two measurement methods are described in this paper. We also propose an improved real-time trajectography system based on a Satellite Based Augmentation System (SBAS) correction, a comparative cost study between aircraft and UAV, while proposing levers for reducing flight inspection time and thus reducing costs. Study of environmental impact of flight inspection is discussed and strategies for using drones to reduce flight inspection costs are also discussed. From this study we draw the conclusions that flight inspection by drone allows first of all the risk of accident reduction for the navigation personnel on board and therefore a completely safe conduct of flight inspection; also it is cheaper for the air navigation services to use drones in addition to the fact that they are ecological solutions as they produces less greenhouse gases unlike the aircraft.
Received: 25 December 2020, Accepted: 07 April 2021, Published Online: 12 May 2021
1. Introduction
Flight inspection [1], which consists in a periodical flight check of NAVAIDs like VHF Omni Range (VOR), Instrument Landing System (ILS), Distance Measurement Equipment (DME), etc., is an International Civil Aviation Organization ( ICAO) [2] requirement for Air Navigation Service Providers (ANSP) and airport managers. For many years, flight inspection has been performed with aircraft. Today, technological advances and minuaturisation have given rise to Remotely Piloted Aircraft (RPA) called Drones or UAV. Applications for civil Drones are many and varied. In several applications, the use of civil drones is a better quality, price and environmental cost option. One of these applications could also be to carry out flight inspection of NAVAIDs using a Drone [3]. In this paper, we propose two architectures for drone’s flight inspection. Moreover, this paper is an extended version of our first paper proposing the two architectures mentioned above [4]. This extended version also studies the economic, ecological and life protection aspects of drone flight inspection team members compared to the classical method by plane. And to do so, the paper has been divided into six sections. Section II is devoted to an overview of the state of the art of flight inspection , section III proposes a real-time and post-processing architecture for drone-based flight inspection and the improvement over the trajectography system, section IV discusses cost analysis, section V examines environnemental and safety impact, and section VI provides discussion, while identifying the innovation proposed by our solution and strategy for the use of drones to reduce the costs of flight inspection.
- State of art
In [5], the authors describe the standard volumes of the instrument landing system, the analyses of the instrument landing system after the flight inspection itself and the restrictions resulting from non-standard values of the inspected instrument landing system parameter and present the standard profiles flown during the flight inspection. In [6], the authors present the architecture of a new flight inspection system based on the use of unmanned aircraft. The proposed architecture is remotely operated and has flight inspection capabilities using radio signal sensors: It also has an accurate positioning system, based on the Global Navigation Satellite System, and uses a low-bandwidth, long-range and redundant data link [6]. In [7], the authors focus on the identification and definition of different types of interference and their classification according to their nature, while they try to methodically describe the measurement procedure, listing the technical equipment needed to carry out the task of identifying and measuring the source of interference of the GNSS signal. In [8], the authors use a drone equipped with the necessary instruments to measure Glide Path-Localizer navigation systems and PAPI lights to ensure the accuracy of the data transmission of these NAVAIDs and to make the required adjustments if necessary, for any changes prior performing the Flight Inspection.
In [9], the authors study (The feasibility, difficulties, benefits and risks) mainly a new method of flight inspection based on an unmanned aerial vehicle (UAV). They show that the general trend is to use UAVs for in-flight inspections in the future. In [10], the authors present an Unmanned Aerial System (UAS), called position information by GPS and coded overlay navigation signals (PIGEONS). The system uses a lightweight hexacopter, with a wingspan of 55 cm, that performs autonomous flight and uses an on-board Software Defined Radio (SDR) that measures instrument landing systems (ILS) and VHF omnidirectional range (VOR) [10]. The ILS system was tested at the DAB airport in Daytona Beach, FL and the VOR was tested at the OMN airport in Ormond Beach, FL [10]. In [11], the authors present a software defined radio (SDR) platform-based unmanned aerial system (UAS) and radio navigation receiver for preliminary validation of radio navigation aids prior to a real flight inspection.
3. Drone based flight inspection architectures
Procedures for the flight verification and validation of air navigation aids are defined in ICAO Document 8071 [1] and for flight validation of Performance Based Navigation (PBN) procedures in ICAO Document 9906 [12]. These procedures apply to the different types of flight inspection, of which there are three.
- Flight inspection of the commissioning of a NAVAID or PAPI: this is a comprehensive flight inspection that establishes the validity of the radio signals around the service area. It is only after commissioning that the equipment obtains authorization from the National Aeronautical Authorities to transmit.
- Periodic flight inspection : verify that the radio signals of the navigational aid are always transmitted in accordance with the regulations. To do this, periodic inspections steal some of the profiles from the commissioning inspection and compare the results with previous results. The interval is generally 6 months for ILS/DME ; and 12 months for VOR/DME and PAPI.
- Special flight inspection : Special flight inspections are required at the request of personnal maintenance or due to an incident or accident investigation. In such inspection, only problematic flight procedures are tested. After any modification to a navigational aid, the periods for periodic inspections are also shortened.
The general concept of the UAV flight inspection operation has been presented in [4]. In this section, we will present successively the real time and post-processing measurement methods, the architecture of the equipment on board the Drone and the improvement over the trajectography system.
3.1. Real time flight inspection
In the case of the conventional aircraft, the flight inspector measures and displays the curves directly in real time on the on-board laboratory. Here, since it is a remote flight inspection, the activation of the measurement functions and the plotting of the curves are done remotely on the ground station which acts as a data processing computer. The parameters of the controlled stations (VOR for example) and the Differential Global Positionning System (DGPS) parameters of the UAV are captured by the receivers on board the UAV (see figure 2) and transmitted through a low latency wireless link [4]. There are two possible scenarios. For measurements within the airport, the measured data is transmitted directly from the UAV to the ground station. For distant measurements, e.g. 25 Nm from the airport, the FAR-RELAY [13]. Drone system is deployed to transmit both the measured parameters and the telemetry data from the Drone.
In the event of non-compliance with the standards observed during the measurements, the flight inspector will report this deviation to the CNS technicians who will make the appropriate adjustments. The drone then repeats the measurements until the deviation is corrected. For the accuracy of the flight profiles, the flight inspection bench (in-flight inspection station here) generates the precise trajectory to be followed to carry out the various measurements (pilot guidance or assistance) and sends it to the UAV control station. The flight inspector communicates to the UAV pilot via an intercom (in the case of aircraft) or radio the different types of flight profiles to be followed (e.g. level flight, normal approach, left/right offset approach, etc.) in order to perform the measurements.
3.2. Post-processing flight inspection
As the UAV can be programmed, it offers flexibility to make measurements at specific points. Here, the method consists of recording the parameters of the equipment to be calibrated and the precise positioning information (DGPS) of the UAV (see figure 3). The mission module on board the drone also provides the time-stamping function by automatically linking the measured VOR / ILS parameters to the DGPS positioning data signal. The data processing will be done afterwards on the ground station once the drone is recovered. For measurements made within the airport and long distances, the data is recorded on a device on board the UAV. Within the airport, the telemetry data of the UAV are sent directly to the UAV control station while the FAR RELAY system is used to transmit these data from the UAV for long distances.
As in the case of the paragraph above (paragraph 3.1), the measurements are repeated until the measured parameters for a given station are in standard.
3.3. Flight inspection Drone payload (On-board equipment)
In this diagram (see figure 4), the data from the different receivers (VOR, ILS, DME and DGPS) are multiplexed and sent on a VHF or UHF datalink through the telemetry, with a RAVEON M7 transmitter/receiver. On the ground, the data is recovered and demultiplexed then sent to the treatment station that will calculate the differences between the reference signal (DGPS) and the measured beacon signal of positioning. This station is equipped with flight inspection software used for this purpose and a database of the airport facilities where is located equipment to be check. The coordinates of the phase center of LOCALIZER’s antenna for example and WGS84 coordinates of the runway thresholds are used. The receivers are switched on remotely (telecontrol) for the realization of the flight inspection of a given equipment (VOR, ILS or DME).
All the receivers on board the Drone and the ground calculations station are synchronized in time with the GPS. At the end of the flight check, different curves and reports are printed with a printer.
3.4. Improvement of the trajectography system
The current trajectory system used for flight inspection is based on the Differential Global Positioning System (DGPS) and has the disadvantage of dragging GPS boxes from site to site. The use of the OMNISTAR SBAS solution [14], which gives an equivalent or a better accuracy than conventional DGPS, is an efficient way of performing this task. The DGPS system used have an accuracy of 10 cm x 10 cm x 20 cm in 3-D.
The OMNISTAR constellation HP and G2, (see figure 1) has a worldwide coverage allowing flight inspection almost everywhere in the world [14].
 Figure 1: OmniSTAR XP and G2 satellite coverage[14]
Figure 1: OmniSTAR XP and G2 satellite coverage[14]
This solution is also applicable to conventional flight inspection aircraft. This makes it possible to dispense with landing to put the trajectography equipment on the ground. Briefings with the Control Tower and ATSEPs are done by radio. It also makes it possible to limit to only one integration of antenna to the aircraft instead of two antennas respectively above and below the aircraft cabin. Figure 4 (see below) gives an illustration of the use of the two trajectography solutions : DGPS and OMNISTAR HP or G2.
4. Cost analysis
Table 1 gives a classification of UAVs considering endurance, wingspan, range and cost, ranging from the cheapest (miniature UAV) to the most expensive (HALE UAV). The UAV that we propose and that allows us to carry out all the measurement for both periodic flight inspection and commissioning is the SKY-Y UAV or equivalent [4], [15] which is a MALE UAV. Table 4 gives the hourly costs of flight inspection by type of vector. The cost per hour of flight inspection depends on the type of aircraft and the flight inspection unit. The costs shown in this table are average values. Table 5 compares the acquisition cost of each aircraft and the cost of flight inspection bench.
So far, no study has shown that the use of civilian drones is more economical than flight inspection by aircraft. Nevertheless in [6], resented the drone solution as being less expensive. The cost analysis mainly considers the cost of flight hours, the purchase price of the aircraft or drone, the fees of the on-board personnel, the purchase price of the measurement equipment. Differences in the number of units and the year of the contract may also have an impact on costs that we do not consider. Some are variable costs that depend on the number of hours flown, while others are fixed costs that are independent of the number of hours flown. For example, crew and fuel costs are mostly variable, while insurance, aircraft depreciation, overhead and maintenance are mostly fixed. Included in the costs already listed are costs related to crew costs or fees for flight inspection staff and equipment for the flight inspection. The advantage with drone flight inspection is the absence of many of the costs mentioned above. This is a considerable financial gain for the flight inspection operators.
For example, remote operation by drone avoids the costs of personnel deployment, dangerous flight and salary costs. In addition, travel time is saved and can be spent on increasing the number of inspections per day.
5. Environmental and Safety Impact
The world is currently dealing with the growing ozone hole. To reverse this trend, and reduce the use of greenhouse gases, states around the world have signed a treaty called the “Paris Climate Accord”. All areas of industry are concerned by this commitment. Civil aviation, particularly flight inspection, has a major role to play, hence the interest of our study.
Tables 2 and 3 show the amount of carbon emission due to fuel combustion according to the type of flight inspection. From these tables, we clearly see that, beyond the choice of the aircraft to be used for flight inspection, the drone emits less carbon than the aircraft. For example, among the aircraft used for flight inspection in our study, Beechcraft King Air 200 emits 300 kg of carbon per hour compared to the SKY Y drone with 15kg of carbon per hour. Although the civil drone SKY-Y is not necessarily the most polluting drone, we think that the drones proposed by some companies are much less polluting than the SKY-Y drone. The carbon production of the drone depends on the size of the drone [8]. Drones can also help us to reduce our carbon dioxide CO2 footprint. Drones generally consume less energy per kilometer.
Table 1: Drone classification
| Drone Type | Altitude | Endurance | Weight | Speed
|
Envergure
|
Range of action |
| Miniature | very low | 20 min | < 2 kg | 50 km/h | 50cm | 15 km |
| Tactics | 200 to 5000 m | 2 to 8h | < 1 ton | 150 to 700 km/h | A few meters | 30 to 500 km |
| MALE (Medium Altitude Long Endurance) | 5000 to 12000 m | 12 to 24 h | < 3.5 tons | 220 to 360 km/h | 10 to 20m | 1000 km |
| HALE (High-Altitude Long-Endurance) | Up to 20000 m | 12 to 48 h | Up to 15 tons | 220 to 650 km/h | 20 to 40 m | >=10000 km |
Table 2: Flight hours by aircraft type and by type of NAVAIDs for periodic flight inspection
| N° | Type of in-flight calibration vector | Cal. VOR/DME [16] | Cal. ILS/DME[16] | Cal. PAPI [16] | Fuel cons. (in liter/hour of flight)² | Observations |
| 1 | ATR 42-300 | 01 h 00 | 3 h 00 | 01 h 00 | 641 [17] | 510 kg/h |
| 2 | BEECH King Air 200 | 01 h 00 | 3 h 00 | 01 h 00 | 378 [18] | 300 kg/h |
| 3 | CESSNA Sovereign Plus | 01 h 00 | 3 h 00 | 01 h 00 | 725 [19] | 576 kg/h |
| 4 | DA42MPP | 01h 00 | 3 h 00 | 01h 00 | 326 [20] | 259 kg/h |
| 5 | Drone SKY-Y Finmeccanica | 01 h 00 | 3 h 00 | 01 h 00 | 21 [21] | 15 kg/h |
Note: The quantities of fuel consumed per flight hour are averages taking into account the fact that fuel consumption is not uniform during all phases of a flight. For example, at take-off, it is higher than during the other phases of a flight (cruise and descent).
For the calculation of CO2 emissions, we use the data provided by [22] and [23].These documents give CO2 equivalents produced by 1 kg of fuel oil or kerosene. Our basis of calculation is then 3.15 kg of CO2 produced for each kg of kerosene burnt, hence the table below.
Table 3: CO2 emissions by aircraft type during periodic flight inspection
| N° | Type of in-flight calibration vector |
CO2 release for NAVAIDS in kg (during Periodic Flight Calibration) |
Total CO2 emissions for NAVAIDs & PAPI (in kg) | ||
| VOR/DME | ILS/DME | PAPI | |||
| 1 | ATR 42 -300 | 1606.5 | 4819.5 | 1607 | 8033 |
| 2 | BEECH King Air 200 | 945 | 2835 | 945 | 4725 |
| 3 | CESSNA Soverign Plus | 1814.4 | 4611.5 | 1537 | 7962.2 |
| 4 | DA42MPP | 815.85 | 2447.55 | 815.85 | 4078.65 |
| 5 | Drone SKY-Y Finmeccanica | 47.25 | 141.5 | 47.25 | 236 |
Table 4: Cost per flight hour by aircraft type
| N° | Type of in-flight calibration vector | Cal. VOR/DME | Cal. ILS/DME | Cal. PAPI | Cost /flight
hour (in Euros) |
Total cost (ILS+VOR/DME+PAPI in Euro) |
| 1 | ATR 42-300 | 01 h 00 | 3 h 00 | 01 h 00 | 5 000 | 25 000 |
| 2 | BEECH King Air 200 | 01 h 00 | 3 h 00 | 01 h 00 | 5 000 | 25 000 |
| 3 | CESSNA Soverign Plus | 01 h 00 | 3 h 00 | 01 h 00 | 5 000 | 25 000 |
| 4 | DA42MPP | 01 h 00 | 3 h 00 | 01 h 00 | 2 000 | 10 000 |
| 5 | Drone SKY-Y Finmeccanica | 01 h 00 | 3 h 00 | 01 h 00 | 1 500 | 7 500 |
Table 5: Acquisition cost of flight inspection bench
| N° | Type of in-flight calibration vector | Cost of acquisition (in millions of US $) | Price Calibration bench (in millions of US $) |
| 1 | ATR 42 -300 | 22 | 2- 3 |
| 2 | BEECH King Air 200 | 8 | 2- 3 |
| 3 | CESSNA Soverign Plus | 30 | 2 -3 |
| 4 | DA42MPP | 2-3 | 2 – 3 |
| 5 | Drone SKY-Y Finmeccanica | 1.5 – 2 | 0.2 |
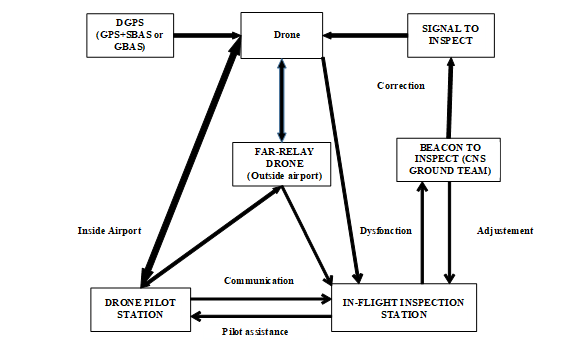 Figure 2: Schematic of real time measurement [4]
Figure 2: Schematic of real time measurement [4]
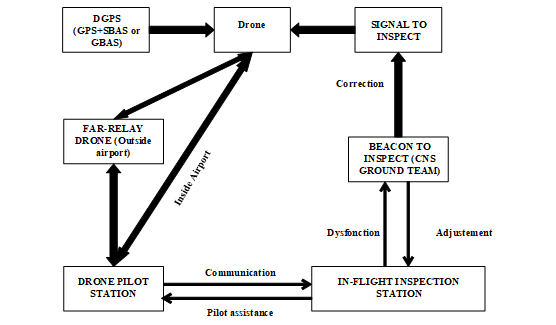 Figure 3: Schematic of post-processing measurement [4]
Figure 3: Schematic of post-processing measurement [4]
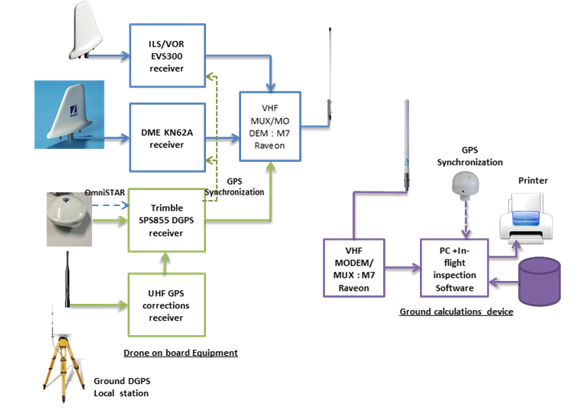 Figure 4: Drone on-board equipment
Figure 4: Drone on-board equipment
Drone flight inspection changes the energy consumption and Greenhouse Gases (GHG) emissions of the main aircraft fuels used for inspection, namely diesel and gasoline. Drones still contribute to pollution from natural gas to electricity sources that vary from region to region used to charge the drones.
Nevertheless, drones are not without consequences for the environment. For example, we have impacts from the manufacturing and extraction of raw materials for lithium-ion batteries for most civilian drones. Battery-powered drones remain a major challenge.
As mentioned at the beginning of this article, airborne inspection takes place at very low altitudes and most crashes of airborne inspection aircraft are like Controlled Flight In to Terrain (CFIT). UAVs (e.g. multi-rotor) allow extended observations at low altitudes without any risk to the flight inspection personnel.
Therefore, in addition to reducing the cost, the drone also reduces the safety risk for the inspection personnel in flight because they are all on the ground, unlike the conventional aircraft.
6. Discussion
The Drone used by [8] allows the extension of the measurements made on the ground by measuring the Glide Path slope and the LOC axis as well as the slope of the PAPI and is limited around airport. A flight inspection drone is proposed by [9] for ILS/DME and PAPI measurements but at less than 50 km with a ground-based GPS augmentation system. The hexacopter, a small UAV proposed by [10], allows measurements for ILS and VOR within the airport with a ground DGPS system. A MALE drone with an autonomy of 10 flight hours is proposed by [24], but the solution is based on a ground augmentation system (DGPS). The drone proposed by [25] allows certain measurements to be taken for flight inspection of the ILS/DME, VOR/DME and PAPI. But this system has a range limited to 10 km. The above solutions offer flight inspection services of Communication Navigation and Surveillance (CNS) equipment and PAPI with short range UAVs. This makes it impossible to perform several measurements such as ILS/DME coverage at 50 km. Therefore, when designing VOR/DME based arrival and departure procedures, it is necessary to ensure that there is good radiation (coverage measurement) from these devices at 50 km around them. These coverage measurements must be made by flying an uninterrupted distance of 314 km by the UAV [4]. The FAR drone system that we have proposed allows for long distance measurements using these drones but does not allow for measurements over 314 km. The UAV solution SKY- Y or equivalent and the architecture we have proposed allow for these different measurements to be made in both real and delayed time. The above solutions all use a ground station as a trajectory system to reinforce the GPS and obtain centimetric accuracy. This requires the installation of an additional receiver on board the UAV to receive the correction data. The solution we have proposed (OMNISTAR HP or G2) allows direct reception of corrections from geostationary satellites and therefore no additional receiver for the UAV. This reduces the drone’s payload.
Today some companies propose multi-rotor drones for flight inspection. These drones cost much less than the one we used for our study. Despite the existence of all these solutions proposed by the companies, we notice the absence of a favorable regulatory framework for the use or adoption of civil drones for flight inspection. Most countries have not yet authorized the use of drones [26] and ICAO document 8071 only mentions aircraft for flight inspection [1]. Also, the evolution of regulations is necessary for a true integration of drones in air traffic. Indeed, every country does not have its own flight inspection unit. The forty or so available inspection organizations [27] pool their resources to satisfy the entire world. For example, in the ASECNA (Agency for Air Navigation Safety in Africa and Madagascar) zone, 17 African countries pool a Flight Control Unit. Another aspect that we did not consider in our study and which is important is the time saving obtained by air navigation personnel. This time saving could be used by staff to improve quality or to increase the time spent on data collection or analysis.
The data in Table 2 relates to the periodic flight inspection. For commissioning type in-flight inspections, these values are multiplied by 2 for ILS/DME and PAPI while it is of order 3 for VOR/DME. Thus, the quantities of CO2 emitted are doubled for some and tripled for others (Table 3). The costs are also multiplied in this order. Rigorous ground maintenance makes it possible to extend the periodic flight control interval of NAVAIDs and PAPIs on the one hand, and the use of small electrically powered drones [8], [9] and [10] on the other hand. This will reduce the carbon footprint for ILS/DME and PAPI by half by moving from a regulatory periodicity of 6 months for ILS/DME to 12 months. And for PAPI from 12 months to 18 months. It is the same for flight inspection of the commissioning type where certain measurements could be made by these so-called Drones. This will also reduce the cost of annual flight inspections by half. In the case of the VOR/DME, for the commissioning flight inspection, this consists of flying a drone at 100 meters (circle of radius 100 m) to preset the centering curve and the modulation rate parameters 9960 Hz and 30 Hz of the VOR. For the ILS, the most demanding measurement during commissioning is the measurement of the nulls of the three Glide Path antennas and the adjustment of the Localizer beam [5]. These measurements can also be performed by a drone. This will reduce the flight time of a commissioning inspection to that of a periodic flight inspection.
Most flight inspection software has measurement coupling functions. For example, the measurement of the axis of the Localizer can be coupled with the measurement of the Glide slope. This saves about 30 minutes on the usual 03 hours of time. A good training of CNS experts on the ground and the availability of an experienced Air Traffic Controller (ATCO) on the day of the flight inspection also reduces the turnaround time of flight inspection aircraft without compromising safety. These levers can be leveraged to reduce the costs and environmental impact of flight inspection. Finally, the use of a SKY-Y [21] or equivalent drone for inspection will certainly reduce flight inspection costs by half and the environmental impact will also be largely limited.
7. Conclusion
Flight inspection is a very technical operation, very expensive, with environmental costs and a danger for flight inspection staff if it is only carried out by transport aircraft. This paper proposed two architectures for using civil drones for flight inspection. Both architectures allow long-distance data collection using drone relay systems or MALE drone. In addition, the paper carried out a comparative financial and environmental study of the use of Drones compared to transport aircraft. The regulatory aspect of drones was also discussed and strategies for the use of electric UAVs to reduce the costs of flight inspection especially during Navaid commissioning. The use of drones for flight inspection appears to be more economical, environmentally friendly and safer for the lives of the flight inspection team members. Nevertheless, both architectures could be improved in future studies. In this study we were not able to carry out a quantitative study of the subject matter, but this may be the subject of another article. Also, flight inspection of RNAV GNSS procedures has not been addressed. The proposed architectures in this article are the basis for different types of flight inspections, so they can be used for the case of RNAV GNSS procedures.
Conflict of Interest
The authors declare no conflict of interest.
Acknowledgment
We would like to thank the entire ASECNA flight inspection team, particularly Mr Moussa DIALLO, head of ASECNA’s flight inspection and Mr NGANAN Ngonnbe Jorim, flight Inspector, Expert.
- I.C.A.O. (ICAO), Manual on testing of Radio Navigation Aids Volume I – Testing of Ground-based Radio Navigation Systems 4 th Edition, 2000.
- I.C.A.O. (ICAO), Annex 10, aeronautical telecommunications, volume II communication procedures including those with PANS status., 7thedition ed., 2016.
- Sékou Togola, Feasibility study of NAVAIDs or PAPI in-flight inspection by Drone: Case of ASECNA, ENAC, Toulouse France, 2016.
- A.D.K. Sékou TOGOLA, Sountongnoma Martial Anicet KIEMDE, “Real Time and Post-Processing Flight Inspection by Drone: A Survey,” in 2020 43rd International Conference on Telecommunications and Signal Processing (TSP), Milan, Italy: 399–402, 2020.
- Andrej Novák; Ján Pitor, “Flight inspection of instrument landing system,” in 2011 IEEE Forum on Integrated and Sustainable Transportation Systems, 329–332, 2011.
- E.P. Cristina Barrado, J. Ramírez, Marc Pérez-Batlle, Eduard Santamaria, Xavier Prats, “Remote Flight Inspection Using Unmanned Aircraft,” Journal of Aircraft, 50(1), 38–46, 2013, doi:10.2514/1.C031450.
- K.H.M.B. Andrej Novák, “Measurement of GNSS signal interference by a flight laboratory,” in Transportation Research Procedia, 271–278, 2018, doi:10.1016/j.trpro.2018.12.011.
- K.P. Ebrahim Rahnama, Mostafa AsaadiIran, “PRE-flight checks of navigation systems and PAPI lights using a UAV,” in 2018 Integrated Communications, Navigation, Surveillance Conference, 2018.
- S.Z. Xinqiao Liu, “Research on Flight Inspection Using Unmanned Aircraft,” Journal of Physics Conference Series, (1237:042053), 2019.
- Daniel Sommer; Ashok Sarath Chandra Reddy Irigireddy; Justin Parkhurst; Kevin Pepin; Eduardo-Rojas Nastrucci, “UAV-Based Measuring System for Terrestrial Navigation and Landing Aid Signals,” in 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), 1–7, 2020, doi:10.1109/DASC50938.2020.9256447.
- Kittipol Horapong; Disapong Chandrucka; Narupon Montree; Punyawee Buaon, “Design and use of ‘Drone’ to support the radio navigation aids flight inspection,” in IEEE/AIAA 36th Digital Avionics Systems Conference (DASC), 2017, doi:10.1109/DASC.2017.8102114.
- 9906 Doc ICAO, “Quality Assurance Manual for Flight Procedure Design Volume 5 Validation of Instrument Flight Procedures.”
- C.V. Prodromos-Vasileios Mekikis, Elli Kartsakli, Luis Alonso, “Flexible Aerial Relay Nodes for Communication Recovery and D2D Relaying,” in IEEE 5th Global Conference on Consumer Electronics, 2016.
- Trimble Navigation Limited, OmniSTAR HP, 2014.
- A. Aeronautica, Medium Altitude Long Endurance (MALE), 2017.
- ASECNA, MANUEL DES SPECIFICATIONS DE CALIBRATION EN VOL, Dakar-Sénégal, 2015.
- ATR-42-3XX, Consommation fuel.
- Beechcraft King Air 200, Consommation fuel.
- CESSNA Citation Soverign I/SP, Consommation fuel.
- DA42MPP, Consommation fuel.
- M. Rutherford, The Italian stylings of the Sky-Y aerial drone, Https://Www.Cnet.Com/News/the-Italian-Stylings-of-the-Sky-y-Aerial-Drone/, 2007.
- IATA, CO2 calculation, 2020.
- C.N. Jardine, Calculating The Carbon Dioxide Emissions Of Flights, 2009.
- Airfield Technology, “IFIS2016PROCEEDINGS,” Belgrade, Serbia.
- Cursir, Cursir Drone.
- Global Drone Regulations Database, Interactive map of drone legislation around the world.
- M. Rodera, Flight Inspection Service Providers, 2018.
Citations by Dimensions
Citations by PlumX
Google Scholar
Crossref Citations
- Wiesław Pamuła, Teresa Pamuła, Tomasz Stenzel, Maciej Sajkowski, Adam Rytter, Daria Żuchowska, "UAV-Based Airport Lights Inspection Without GNSS Positioning Support." Remote Sensing, vol. 17, no. 6, pp. 1013, 2025.
No. of Downloads Per Month
No. of Downloads Per Country