
Gripper Finger Design for Automatic Bottle Opener
Volume 6, Issue 2, Page No 1065-1073, 2021
Author’s Name: Suchada Sitjongsataporn1,a), Kornika Moolpho2, Sethakarn Prongnuch3
View Affiliations
1Department of Electronic Engineering, Mahanakorn Institute of Innovation (MII), Faculty of Engineering and Technology, Mahanakorn University of Technology, Bangkok, 10530, Thailand
2Department of Mechatronic Engineering and Automation, Mahanakorn Institute of Innovation (MII), Faculty of Engineering and Technology, Mahanakorn University of Technology, Bangkok, 10530, Thailand
3Department of Computer Engineering, Faculty of Industrial Technology, Suan Sunandha Rajabhat University, Bangkok, 10300, Thailand
a)Author to whom correspondence should be addressed. E-mail: ssuchada@mut.ac.th
Adv. Sci. Technol. Eng. Syst. J. 6(2), 1065-1073 (2021); ![]() DOI: 10.25046/aj0602121
DOI: 10.25046/aj0602121
Keywords: Parallel Gripper Finger, Robotic Dual-Arm, Automatic Bottle Opener

Export Citations
This paper presents a design of parallel gripper finger for robotic dual-arm working with an automatic push-down bottle crown cork cap opener on ABB’s Yumi collaborative bartender robot. A safe gripper finger is made from ABS plastic by 3D printing for human-based interaction design for grasping and holding a glass bottle. Rack design and proposed automatic push-down bottle cap opener using pneumatics are presented to support a gripper finger. Experimental tests as bartender environment with 4-different types of carbonated soft drink with crown cork cap show that can be achieved effectively with average of 91.5% percentage of successful cap opener.
Received: 21 December 2020, Accepted: 12 April 2021, Published Online: 28 April 2021
1. Introduction
In recent years, many types of safe collaborative robot with single arm and dual-arm intended for direct collaboration with humanbased workers in the industrial automation with incrementally superior capacities have been invented to handle bimanual tasks in the product assembly [1]- [4]. Robot can assist humans in many tasks [5], [6]. Performance of picking and placing objects using robotics technology is an important objective of industrial automation for picking and packing boxes [3], [4] with computer-based vision [7]. Robot Arm is being used the manipulation of static objects that are fast and proven to be reliable. There are many types of robotic arm used. A picking robot arm is scheduled to pick a task in the specific working space to enhance the stability and movement with a specific trajectory points [8]. In [9], the authors have presented a cable-driven underactuated robotic gripper, which is designed for adaptable picking objects in different shapes, weights, sizes, and textures. ABB’s Yumi robot has been reported many successful efforts to improve dual-arm operations for synchronized programming in industrial tasks detailed in [3]. Kinematic plan for conventional industrial robotic arms are capable of moving the static object manipulation. However, there is a trouble when moving object manipulation such as a smooth picking up a bottle and a grasping motion [10]. Our inspiration of this research came from the Japanese news that the Japanese owner of restaurants and shops are struggling to hire staff in an aging society. Then in 2020, the Japan’s first robot bartender [11] has begun serving up drinks in a Tokyo pub with the industrial robot. In order to avoid jerking the object and figuring out the reasonable time in safety, we present a design of gripper for industrial ABB’s Yumi robotic dual-arm.
To enhance the gripping performance, the grippers perform a pick-place process by using the force to compensate the gravitational force of objects in motion [12].
Moreover, the grippers have to be mated with objects to ensure that the objects do not either fall off or get damage from the grippers. The 2-finger parallel gripper was chose because it is the most flexible design and is able to carry out most percentage of applications. The ABB’s YuMi is offered gripper options. The basic function of the option is to grasp parts using a parallel grip [13]. There are some inventions related to a crown cap bottle opener [14],[15]. A conventional bottle opener is a specialised lever inserted beneath the pleated metalwork pulling it off when upward force is applied to the handle end of the opener. Autonomous bottle opener robot [14] has presented with a simple bottle opener to assist the bartender. Without suffering from wrist motion disorder while opening, a push bottle opener [15] includes a mechanism configured to remove a bottle cap when the opener is introduced over a bottle and pushed downwardly.
To our best knowledge, a design of gripper finger on ABB’s Yumi collaborative robot is presented for human-based tasks performing automatic manipulation collaboration with an automatic push-down glass bottle opener using pneumatics in order to operate on grasped objects.
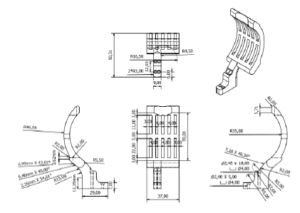
Figure 1: Gripper finger design for grasping a bottle.

Figure 2: Prototype of gripper on ABB’s Yumi robot.
In this paper, a design of parallel gripper finger of dual arm robot working by holding safely a glass bottle is proposed for carbonated beverage and opening the crown cork cap opener with the automatic push-down bottle opener using the pneumatics.
The contribution of this research are listed as follows.
- The learning human motion pattern on the left-hand and righthand side gestures of ABB’s Yumi collaborative bartender robot working with the automatic push-down bottle opener will be proposed for gasping a glass, preparing a glass and pouring a beverage, which will be able to replace humans in the future.
- To design a safe gripper finger for holding a glass while movement based on the dual-arm industrial robot.
- To propose an automatic push-down crown cap bottle opener based on the dual-arm industrial robot.
2. Proposed Gripper Finger of Robotic Dual-Arm
In this section, the gripper finger of robotic dual-arm is proposed to apply with an automatic bottle opener. The design of automatic bottle opener controlled by the solenoid circuit are presented as follows.
2.1 Proposed Gripper Finger
In this paper, gripper finger design is to optimise the collaborative robot for picking and placing a bottle with a specific process. The robotic parts handler that physically interacts with the working environment. This leads to increase throughput, improve system reliability and compensate for robot inaccuracy.
The objective is to gasp and hold safely a glass bottle with a parallel gripper while using pneumatic for opening a bottle crown cork cap with an automatic push-down bottle opener. The dimension of carbonated soft drink in 250 ml glass bottle is of 11 × 20 × 13 cm with the 25mm crown cork bottle cap. The design of safe gripper finger is made by 3D-printing ABS (Acrylonitrile Butadiene Styrene) plastic for grasping and holding a glass bottle and human-friendly interaction is shown in Figure 1.
Depending on the material used, a stress limit of designed gripper finger is tested on the stress analysis by the Autodesk Inventor. Prototype of gripper on ABB’s Yumi robot is shown in Figure 2.
2.2 Proposed Automatic Bottle opener
The concept of an automatic bottle cap opener mechanism is to effortlessly open and remove the bottle cap in one push-down by single handed robot. Rack design for proposed automatic bottle opener implementation using pneumatics is being worked reliably with the collaborative robot.
Mechanism of proposed automatic bottle opener consists of aluminium profile, bracket, a bottle stand, an automatic push-down bottle cap opener at the top of rack, a bottle opener stand, a pneumatic air cylinder, and a stroke adjustment sensor. Installation of an automatic bottle crown cap opener is shown in Figure 3. The dimension of rack design is 15.1 × 17.4 × 42 cm connected with the pneumatic systems.
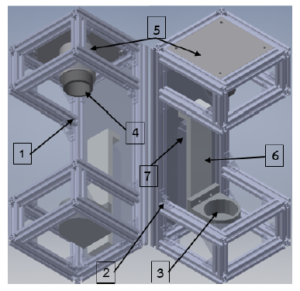
Figure 3: Mechanism of proposed automatic push-down bottle opener: 1) Aluminium profile; 2) Bracket; 3) Bottle stand; 4) Automatic push-down bottle cap opener; 5) Bottle opener stand; 6) Pneumatic cylinder; 7) Stroke adjustment sensor.
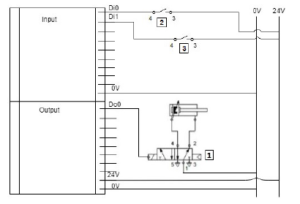
Figure 4: Diagram of solenoid circuit and I/O robot interface: 1) Solenoid circuit for automatic bottle opener; 2) Stroke adjustment sensor circuit at the upper of bottle opener; 3) Stroke adjustment sensor circuit at the lower of bottle opener.
The process of an automatic bottle cap opener starts with the right-hand side of robot arm released a bottle into a bottle stand after selecting and picking a beverage. Then an automatic bottle opener moves vertically by the pneumatic air cylinder in order to remove a crown cap by an automatic push-down bottle cap opener installed at the top of rack in one push down motion. A stroke adjust sensor is referred as a switch for controlling the outstroke of air cylinder while operation.
The relationship on outstroke between force, radius and pressure that can given from

where Fr is the resultant force, P is the pressure on the surface and Ae is the effective cross-sectional area of the piston surface.
Solenoid circuit is connected with I/O robot interface as shown in Figure 4. The output signal voltage of robot is used at 24 Vdc while operating. Prototype of automatic push-down bottle opener using pneumatics including with the rack for safety is shown in Figure 5.
3. Coordinate systems of collaborative robot
The mechanical arm of ABB’s Yumi robot is divided into an arm, a wrist and an end-manipulator. All the manipulators have marked for four reference points used during process to posture the tool in the workspace with a given orientation. The robot orientation is described with three-dimensional rotation using an order set of four numbers named quaternions. The ABB collaborative robots are be able to control manually by using the flex pendant [16], which is a hand held controller connected to the robot.

Figure 5: Prototype of automatic push-down bottle opener using pneumatics.
The robot movement is programmed by teach pedant, which are relative to the Tool Center Point (TCP). Normally, TCP is defined as the active point of the tool as one point for each tool at a given time. When the robot is programmed to move along a given path following by TCP expressed in relation to the coordinate system.
Let tco be the translation vector from the original coordinate system of tool flange to TCP as [17]
![]()
Consider M be the translation matrix from the tool flange to TCP as

Therefore, the linear equation of system can be expressed as
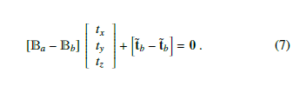
It is seen that all information determining the coordinate of TCP is achieved following (7).
4. Experimental Setup
Simulation setup for ABB’s Yumi bartender on specific environment is illustrated with the four different type of beverages. Experimental setup of ABB’s Yumi collaborative robot bartender consists of TCP calibration and workobject using the ABB Teach Pedant controller on chessboard pattern [18] at the base frame, including with the proposed bartender algorithm.
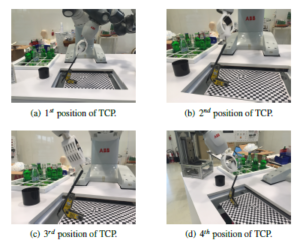
Figure 6: TCP calibration on chessboard pattern.
| 1: Initial Parameters: GUI, Status1, 2, , …, 4, Drink#1, 2, …, 4, Sensor Top, Sensor Bottom; 2: Initial Functions: | |
| 3: | PickupDrink() { |
| 4: | Input Position of Robot from CAMERA |
| 5: | Input Kinematic of Robot |
| 6: | Position and Kinematic Calculation() |
| 7: | Output Robot move to pick bottle |
| 8: | Output Robot move to open bottle cap and pick glass |
| 9: | SolenoidON () |
| 10: | Output Robot move to pick bottle |
| 11: | Output Robot move to pour |
| 12: | IF (Drink# == Drink#1) {
Output Pour Drink#1 Else Output Pour Drink#2 |
| 13: | } |
| 14: | Output Keep bottle and serve |
| 15: | } |
| 16: | SolenoidON () { |
| 17: | IF (Sensor Top == ON) {
SolenoidOFF() Else NO } |
| 18: | SolenoidOFF () { |
| 19: | IF (Sensor Bottom == ON) {
YES Else NO } |
| 20: | Main () { |
| 21: | Switch (GUI == Drink#?) { |
| 22: | Case Drink#1 :
Status1 = PickupDrink () |
| 23: | Case Drink#2 :
Status2 = PickupDrink () |
| 24: | Case Drink#3 :
Status3 = PickupDrink () |
| 25: | Case Drink#4 :
Status4 = PickupDrink () } |
Algorithm 1 ABB’s Yumi Bartender algorithm

Figure 7: Demonstration of ABB’s Yumi bartender robot with gripper finger dual-arm.
4.1 TCP calibration
TCP calibration is modified on the chessboard pattern by determining the TCP 4-reference position with different type of grasping gesture object using ABB Teach Pendant as shown in Figure 6.
4.2 Workobject
A workobject [19] is a coordinate system used to describe the position of a work piece. The workobject consists of two frames as a user frame and an object frame. All positions will be related to the object frame, which is related to the user frame and world coordinate system. Working movement is modified on the chessboard pattern by marking the 3-reference point on x-axis and y-axis using ABB Teach Pedant.
4.3 Bartender algorithm
The proposed ABB’s Yumi bartender algorithm is as shown in Algorithm 1. The process is starting from taking order from user via GUI interface on web application, then select one beverage and open the cap with an automatic push-down cap opener using the right-hand side of robot. Finally, to pick a glass and then pour the selected beverage into a glass by the left-hand side of robot. Demonstration of ABB’s Yumi bartender robot with gripper finger dual-arm working with the automatic push-down bottle opener is depicted in Figure 7.
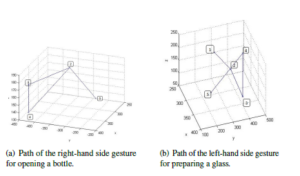
Figure 8: Path of ABB robot gripper gesture for opening a bottle on the right-hand side and preparing a glass on the left-hand side of robot.
5. Experimental Results
Experimental results show that ABB dual-arm robot performing gesture-based robotic gripper capable of being human-based recognised consist of four paths as two paths for opening a bottle cap using an automatic push-down bottle cap opener by pneumatics and preparing a glass. Next two paths for pouring a selected drink by the right-hand side into a glass holding by the left-hand side of robot gripper as follows.
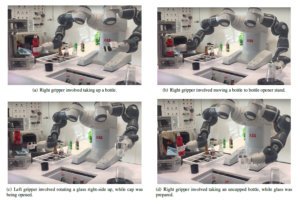
Figure 9: Grasping and movement of opening a bottle cap along Route 1 and Route 2.
5.1 Path for opening a bottle and preparing a glass
Figure 8 shows the paths of gripper gesture controlled the right-hand side robot for opening a bottle and for preparing a glass on the left-hand side of robot. Experimental route for opening a bottle cap by a right-hand side gripper were the No. 1-4 shown in Figure8(a). Route 1 started at location No. 1, involved taking up a bottle from location No. 2 and moving it to replace on the bottle opener stand at location No. 3 and waiting for opening a bottle cap at location No. 4, then taking up a bottle to location No. 2 again waiting for pouring in the next route. Route for preparing a glass by a left-hand side gripper were the No. 1-5 shown in Figure8(b). Route 2 started at location No. 1, involved picking up a glass from location No. 2 and moving it to location No. 3 and then rotating a glass right-side up to location No. 4, then standby for the next route at the location No. 5.
Figure 9 demonstrates the step-by-step of gesture movement of ABB’s Yumi bartender collaborative robot while using an automatic push-down bottle cap opener by pneumatics at the right-hand and holding a glass prepared by a left-hand side of robot gripper followed Route 1 and Route 2. Figure 9(a) shows the right gripper was taking a bottle to the rack of automatic push-down bottle opener,
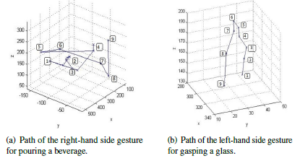
Figure 10: Path of ABB robot gesture movement for pouring an uncapped beverage.
pick up a glass depicted in Figure 9(b). Meanwhile the bottle was being uncapped by automatic push-down opener using pneumatic, the right gripper was prepared into standby mode and left gripper was rotating a glass right-side up as shown in Figure 9(c). After that, the right gripper was taking out an uncapped bottle presented in Fig 9(d) and left gripper was waiting for pouring in the next route.
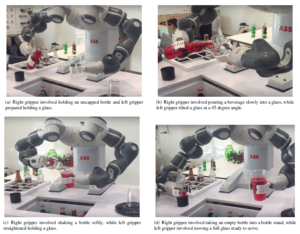
Figure 11: Grasping and movement of pouring an uncapped beverage into a glass along Route 3 and Route 4.
Now that a glass has been prepared by a left-hand side gripper
5.2 Path for pouring a beverage into a glass and ready to pour. Route for pouring a beverage were the No. 1-9 shown in Figure10(b). Route 4 started at location No. 1, moving
Figure 10 shows the paths of gripper gesture controlled the righta glass prepared from location No. 2 to No. 3, tilted a glass at a hand side robot for pouring a selected beverage without cap into a
45 degree angle from the location No. 4 to No. 5 and then poured glass holded by the left-hand side of robot. Experimental route a beverage slowly by a right-hand side gripper so that the liquid for pouring a uncapped bottle by a right-hand side gripper were the landed directly in the middle side of a glass holding by a left-hand
No. 1-9 shown in Figure 10(a). Route 3 started at location No. 1, side gripper of robot. Once a robot poured about half of beverage involved holding an uncapped bottle to location No. 2 and moving it into a glass at the location No. 6, then straightened a glass and at the front of a glass holding by a left-hand side gripper to location poured a rest of beverage directly into the center of glass from the
No. 3, pouring slowly from location No. 5 to No. 6 and shaking location No. 7 to No. 8, and then moving a full glass with beverage softly from location No. 7 to No. 8, and then taking up an empty to location No. 9 at the end route. bottle to location No. 9 at the end route.
All proposed paths are introduced for safely working on bartender responsibilities including with opening a bottle, pouring a beverage and serving a beverage. The paths of successful gesture for grasping a bottle and hold a glass by proposed gripper finger have been presented that they can apply effectively and safely to work as a bartender controlled through a web application. Experimental results shown that the average percentage of 91.5% of successful cap opener can be achieved effectively.
Conflict of Interest
The authors declare no conflict of interest.
Acknowledgment
ABB Robotics provided a YuMi robot for the co-operative education and valuable support regarding YuMi programming. The authors would like to thank Pongthanakorn Yaibuatong, Department of Mechatronic Engineering and Automation, Faculty of Engineering, Mahanakorn University of Technology, Bangkok, Thailand for his support.
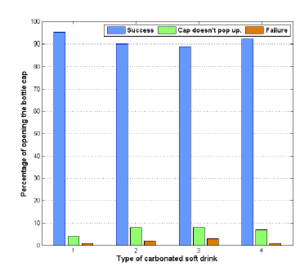
Figure 12: Percentage of opening the bottle cap by automatic push-down bottle opener using pneumatics.
Figure 11 demonstrates the step-by-step of gesture movement of ABB’s Yumi bartender collaborative robot while pouring a beverage using a right-hand side gripper into a glass holding by a left-hand side of robot gripper followed Route 3 and Route 4. Figure 11(a) shows that the right gripper was holding an uncapped bottle and then pouring a beverage slowly into the middle side of glass, while the left gripper tilted a glass at a 45 degree angle depicted in Figure 11(b). Until the bottle was empty, the right gripper was shaking a bottle softly, while the left gripper was holding straighten a glass in Figure 11(c). After that, the right gripper was taking an empty bottle into a bottle stand and left gripper was ready to serve as shown in Figure 11(d).
The average percentage of the results from opening a bottle cap is as the success of opening bottle cap is given for 91.5 %, the bottle cap doesn’t pop up the opener for 6.75 % and the failure for 1.75 % presented in Figure 12, which are achieved effectively.
6. Conclusion
In this paper, a design of gripper finger working with an automatic push-down bottle crown cork cap opener has been presented using pneumatics on ABB’s Yumi collaborative robot for the bartender environments with the 4-different types of carbonated soft drink. The proposed semi-circular shaped gripper is appropriately designed for grasping and holding a bottle safely and working with the automatic bottle opener. The design of safe parallel gripper finger made by ABS plastic for grasping and holding a glass bottle and humanbased interaction has been introduced. A gripper finger design with the industrial specification is tested on the stress analysis depending on the material used by the Autodesk Inventor. Rack design for an automatic push-down bottle cap opener using pneumatics supported a proposed gripper finger has been proposed.
- T. S. Li, P. Kuo, Y. Ho, G. Liou, “Intelligent Control Strategy for Robotic Arm by using Adaptive Inertial Weight and Acceleration Coefficients Particle Swarm Optimization”, IEEE Access, 7, 126929-126940, 2019, doi: 10.1109/AC- CESS.2019.2939050.
- J. Borras, R. Heudorfere, S. Rader, P. Kaiser, T. Asfour, “The KIT Swiss Knife Gripper for Disassembly Tasks: A Multi-Functional Gripper for Bimanual Manipulation with a single arm”, in 2018 IEEE/RSJ Interna- tional Conference on Intelligent Robots and Sysems (IROS), 2018, doi: 10.1109/IROS.2018.8593567.
- M. Stenmark, E. A. Topp, M. Haage, J. Malec, “Knowledge for Synchronized Dual-Arm Robot Programming”, in 2017 Artificial Intelligence for Human- Robot Interaction: AAAI Technical Report, 77-84, 2017.
- M. Stenmark, E. A. Topp, “From Demonstrations to Skills for High-Level Pogramming of Industrial Robots”, in 2016 Artificial Intelligence for Human- Robot Interaction: AAAI Technical Report, 75-78, 2016.
- Y. Xiong, V. Shapaval, A. Kohler, J. Li, P. Johan, “A Fully Automated Robot for the Preparation of Fungal Samples for FTIR Spectroscopy Using Deep Learning”, IEEE Access, 7, 132763-132774, 2019, doi: 10.1109/AC- CESS.2019.2941704.
- M. Chantharasri, W. Suriwong, S. Pengjeam, S. Prongnuch, “The Develop- ment of Suan Sunandha Rajabhat University PR Robot”, in 2020 Engineer- ing, Science, Technology and Architecture Conference (ESTACON), Nakhon Ratchasima, Thailand, 2020.
- T. Wiangtong, S. Prongnuch, “Computer vision framework for object mon- itoring”, in 2012 IEEE International Conference on Electrical Engineer- ing/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), 2012, doi: 10.1109/ECTICon.2012.6254291.
- Z. Zhiyong, H. Dongjian, T. J. Lei and M. Lingshuai, “Picking Robot Arm Trajectory Planning Method”, Sensors & Transducers, 162(1), 11-20, 2014.
- K. Lee , Y. Wang, C. Zheng, “TWISTER Hand: Underactuated Robotic Gripper Inspired by Origami Twisted Tower”, IEEE Transactions on Robotics, 36(2), 2020, doi: 10.1109/TRO.2019.2956870.
- A. Menon, B. Cohen and M. Likhachev, “Motion planning for smooth pickup of moving object”, in 2014 IEEE International Conference on Robotics and Automation (ICRA), 2014, doi: 10.1109/ICRA.2014.6906895.
- T. Kelly and A. Tomoshige, “Japan’s robot bartenders: Last call for human service?”, [Online], Available: https://www.japantimes.co.jp/news/2020/02/06/business/tech/japans-robot- bartenders-last-call-human-service/, Accessed on 03-Apr-2021.
- D. Li, “Application for the ABB IRB 14000 YuMi robot using Integrated Vision and 3D printing”, Thesis, Department of Mechanical Engineering and Produc- tion Technology, Lab University of Applied Sciences Technology, Lappeen- ranta, 2020.
- ABB, “IRB 14050 Single-arm YuMiOR Collaborative Robot”, [Online], Avail- able: https://new.abb.com/products/robotics/industrial-robots/irb-14050-single- arm-yumi, Accessed on 25-Nov-2020.
- J.Ph. Clerc, “Autonomous Bottle Opener Robot – ABOR”, University of Florida, Department of Electrical and Computer Engineering, Intelligent Machines De- sign Laboratory, 2002.
- Gregory Arthur Jury, “Bottle opener”, US20160145087A1, United States, [Online], Available: https://patents.google.com/patent/US20160145087A1/en, Accessed on 03-Apr-2021.
- ABB Robotics, “Application manual FlexPendant SDK”, [Online], Avail- able: https://library.e.abb.com/public/7a93a58f26acb6acc1257b67004c6b0b
/3HAC036958-en.pdf, Accessed on 10-Dec-2020. - J.Hallenberg, “Robot Tool Center Point Calibration using Computer Vision”, Master’s Thesis, Department of Electrical Engineering, Linkoping University, 2007.
- ABB, “Detailed information for: 3HAC028357-001”, [Online], Available:https://new.abb.com/products/3HAC028357-001/teach-pendant, Access on 20-Nov-2020.
- ABB, “Operating manual RobotStudio 5.12”, Document ID: 3HAC032104-001 Revision: B, [Online], Available: https://library.e.abb.com/public/792b4432c1402c40c1257b4b00521 525/3HAC032104-001RevBen.pdf, Accessed on 10-Dec-2020.