Decentralized Management System for Solid-State Voltage Regulators in Nodes of Distribution Power Networks

Adv. Sci. Technol. Eng. Syst. J. 6(1), 378–385 (2021);
 DOI: 10.25046/aj060143
DOI: 10.25046/aj060143
The article describes the concept and architecture of a decentralized control system for a solid-state voltage regulator (SSVR). The SSVR is a universal device for controlling the mode and operation parameters of medium voltage electrical networks. SSVR manage the amount of current in line using the vector voltage control method. The SSVR control system consists of two levels: the SSVR semiconductor converter control level (the technological control system), SSVR cluster management level (intelligent control system). The objective of the study is to develop an algorithm for managing the SSVR cluster located in the nodes of the distribution electric network. The Raft consensus algorithm for managing the computing cluster is applied to ensure reliable decentralized network management. The algorithm is iterative. Ethernet and PLC architectures are proposed for constructing a data transmission network between SSVR nodes. A simulation model of the SSVR cluster and its control system is developed to study the operation of the control system (node shutdown, loss of communication). The criteria for the normal operation of the intelligent control system are formulated and an algorithm for its operation in emergency situations is presented. The studies of the SSVR control system confirmed the operability of the developed control system in normal and emergency operation of the cluster on a simulation. The dependence of the control system response time on the number of cluster nodes is investigated. The maximum number of nodes in the SSVR cluster depending on the tasks being solved by the SSVR will be limited by the speed of the control system. If the number of cluster nodes increases, it is necessary to enlarge the minimum time interval between requests for control commands.
1.Introduction
The concept of the Internet of Energy (IoE) is the logical development of smart grid technology [1, 2]. IoE is a new architecture for building a power electricity system with decentralized management. A key role in this system is assigned to intellectualization and economic interaction between all network users (energy transactions).
Distribution networks of the future will have a complex configuration and a large number of types of distributed generation sources. Thus, power flows should be bi-directional unlike traditional networks. To implement this principle, electrical networks of all voltage classes, especially low and medium voltage networks, must become “controlled”. From a technical point of view, this is hindered by the lack of Flexible AC Transmission System (FACTS) devices in medium voltage networks.
The design of solid-state voltage regulator (SSVR) is known [3]. The SSVR is a power flow control device built on the basis of two transistor converters (Figure 1). The SSVR control method is based on the voltage vector regulation principle – the SSVR manage the voltage drop vector across network rector L [4], and the converter itself acts as a controlled current source. The SSVR is installed in the nodes of the medium voltage distribution network and allows to control the network operation modes.
 Figure 1: SSVR power unit and control system: T1 – shunt transformer; AC/DC – rectifier; C – capacitive storage; DC/AC – inverter; T2-T4 – serial transformers; L – network choke; V – voltmeter; ICS – intelligent control system of a neighbor node with SSVR
Figure 1: SSVR power unit and control system: T1 – shunt transformer; AC/DC – rectifier; C – capacitive storage; DC/AC – inverter; T2-T4 – serial transformers; L – network choke; V – voltmeter; ICS – intelligent control system of a neighbor node with SSVR
It is necessary to install several SSVRs in the distribution network to perform effectively all the specified functions. The required number of devices depends on the network configuration and the tasks being solved.
The SSVR has a two-level control system (Figure 1). The lower level system is a technological control system (TSC) [5]. The upper level control system is an intelligent control system (ICS). The TCS task is to form the required voltage vector and control the power elements of the converter. The ICS task is to manage the SSVR cluster, communication of SSVRs within a cluster and the command generation for the TCS.
The novelty of this work is that the RAFT consensus algorithm is applied in ICS to provide smooth voltage regulation and control of the electrical network with SSVR.
The article presents the results of the development and research of the SSVR decentralized control system of the upper level. The section 2 provides an overview of decentralized control systems used in the electricity industry. The section 3 describes the architecture of the SSVR ICS. The algorithms for the functioning of the ICS (the algorithms for managing a cluster and a network) are given in 4 and 5 sections. The section 6 describes the simulation model of SSVR ICS and the section 7 presents the simulation results of emergency operation modes.
2. Literature Review
Traditional power grid management systems require a central control room. Each control element must communicate with the control center and often not only the main, but also backup communication channels are required. Situations when communication with the control center is impossible may occur during the operation of networks and the need for autonomous operation arises. Decentralized management systems are the solution to this problem.
There are some tools for decentralized control of emergency switching based on reclosers for 6-10 kV distribution networks [6]. Various algorithms [7] of reclosers operation are possible to control emergency modes. The proposed methods of decentralized management are used only for emergency shutdown operations in a medium voltage network. This functionality is not sufficient for smart distribution networks. A smooth voltage regulation is necessary, and switching should be performed in both emergency and normal modes in order to optimize the power flows in electricity network of up to 20 kV.
The problem of creating a decentralized intelligent management system for networks with distributed generation is most fully considered in [8], where a method of multi-agent service restoration and the digital model of a power system with multi-agent control are proposed. The principles of building a multi-agent system, as well as the stages of its operation are determined.
The most common control system architecture is SCADA (Supervisory Control and Data Acquisition). As shown in [9], to solve similar problems the traditional for SCADA centralized control model requires either improving the existing communication infrastructure to provide higher data transfer rate or storing measured data at a local substation and then organizing data exchange between substations to ensure the operation of complex applications in real time. At the same time, the amount of saved data turns out to be less than the amount of data saved in the SCADA database because each substation is responsible only for its own network section. This allows data to be saved more frequently, such as once per second or millisecond depending on the application. Since most of the data is stored locally, the requirements for communication links between substations and control centers are reduced.
This approach requires the use of decentralized algorithms that can bypass reduced SCADA functionality to provide optimal local control. Local controllers are intelligent enough to coordinate their work and thus provide reliable global control.
Some of these features are found in modern Energy Management Systems (EMS), for example, power flow analysis and generation prediction, that now will have to be used locally. At the same time, the EMS system, together with the Distribution Management System (DMS) and the Outage Management System (OMS), are superstructures of SCADA systems, and do not allow to fully implement the necessary functionality within a distributed control system [10].
In modern smart grid it is necessary to predict possible events (based on monitoring and trend analysis) and take proactive measures based on this data instead of a passive reaction to events in the distribution network. This forecast applies to both generation and consumption. Power flows in such network model will not be strictly deterministic. It is obvious that such a complex unstructured network must have a powerful control system that coordinates the operation of all network components. To do this, all components of the network must “communicate” with each other and with the control center through special communication networks. One of the ways to solve this problem is to use the consensus algorithm [11].
In [12], a distributed control strategy is proposed to share unbalanced currents in three-phase three-wire isolated AC microgrids. The control algorithm is based on an approach where the microgrid is analyzed not as a three-phase system, but as three single-phase subsystems. The consensus algorithm is used in distributed control system [13] to share the imbalance and harmonics between different converters in three-phase four-wire droop-controlled microgrids.
An asynchronous averaging consensus protocol [14] is proposed to estimate the values of inseparable global information. The consensus protocol is then combined with a fully distributed primal dual optimization utilizing an augmented Lagrange function to ensure convergence to a feasible solution with respect to power flow and power mismatch constraints. This algorithm uses only local and neighbourhood communication.
The consensus algorithm can be used to reach an agreement for resources dispatch among multiple controllable components in distribution grids, taking into account the individual voltage support capability of sources [15]. This algorithm reduces the time required to reach a consensus by solving the fastest distributed linear averaging (FDLA) problem.
An algorithm based on the RAFT consensus is used in [16], but in order to ensure the security of the switching infrastructure of the network against a specific type of attack, called a timing attack. In contrast to these studies, the authors use the RAFT consensus algorithm to ensure smooth voltage regulation and control of the electrical network parameters.
3. SSVR Control System
The concept of the IoE implies that the network becomes active and manageable, and the efficiency of management will only increase with an increase in the number of control devices in the network. At each point of the electrical distribution network where the SSVR installation is required, a node consisting of three connected elements is formed:
- solid state voltage regulator (SSVR);
- technological control system (TSC) – realizes the physical execution of SSVR control commands, measurement of the parameters of its functioning and transfer them to the upper level control system;
- intelligent control system (ICS) – provides the functions of SSVR operational control, diagnostics of its state, collecting monitoring data and implementation of algorithms for intelligent control of the SSVR network in order to control effectively power flows, ensure the required power quality and reduce losses during its transmission.
The SSVR control system has a peer-to-peer network structure and the SSVR ICS units are the nodes of this network. The ICS is an industrial computer, geographically located near the SSVR (the maximum distance is determined by the specification of the interface for TCS connecting). Also, the ICS is equipped with an interface for communication with other SSVRs ICS to create a data exchange network on the operating modes of the devices and to implement the algorithms for active-adaptive power transmission network control. At the same time, the results of the work of these algorithms should be propagated to neighboring nodes with minimal delays and with high reliability. This sets high requirements for an information network built in parallel with an electrical one.
The physical implementation of this network is possible using various technologies, including power line communication (PLC) technologies. A scheme of a 6-20 kV distribution network section with transformer substations and jumpers for controlling power flows with SSVR nodes and corresponding TCS and ICS are shown in Figure 2.
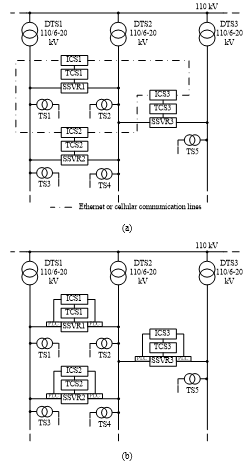 Figure 2: Structure of SSVR ICS: DTS1-3 – district transformer substations 110/6-20 kV; TS1-5 – transformer substations 6-20/0.4 kV; SSVR1-3 – solid-state voltage regulators; TCS1-3 – technological control system; ICS1-3 – intelligent control system: for Ethernet or cellular communications technology (a); for PLC technology (b)
Figure 2: Structure of SSVR ICS: DTS1-3 – district transformer substations 110/6-20 kV; TS1-5 – transformer substations 6-20/0.4 kV; SSVR1-3 – solid-state voltage regulators; TCS1-3 – technological control system; ICS1-3 – intelligent control system: for Ethernet or cellular communications technology (a); for PLC technology (b)
In Figure 2a the ICS perform the function of routing information flows. The structure of the SSVR ICS for the PLC technology is shown in Figure 2b.
In addition to communication interfaces with TCS and other ICSs connected to SSVR located in the same electrical distribution network, there is an operational control client interface. This interface allows the operator to connect to the operating ICS in order to view the current parameters of its operation and, if necessary, correct the parameters of the operation of control algorithms for a specific SSVR or the SSVR network as a whole.
As indicated above, the automatic control in this system is decentralized and the regulation functions are performed in each SSVR ICS by local software implemented on the basis of the electrical network control algorithm (Figure 3). The developed control algorithm of the ICS is necessary to match the SSVR nodes in the distribution network. The function of distributing information about the state of network nodes is performed by the software for managing a group of industrial computers of the IСS. This group of ICS operates as a single system, called a cluster. The cluster control algorithm is used as the algorithm of this software.
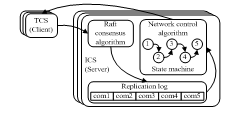 Figure 3: ICS functional diagram
Figure 3: ICS functional diagram
As indicated above, the automatic control in this system is decentralized and the regulation functions are performed in each SSVR ICS by local software implemented on the basis of the electrical network control algorithm (Figure 3). The developed control algorithm of the ICS is necessary to match the SSVR nodes in the distribution network. The function of distributing information about the state of network nodes is performed by the software for managing a group of industrial computers of the IСS. This group of ICS operates as a single system, called a cluster. The cluster control algorithm is used as the algorithm of this software.
4. Network Control Algorithm
4.1. Management Task
Let’s imagine a distribution electric network in the form of a graph, at the vertices of which there are transformer substations (TS) with their electricity consumers, and power lines act as arcs, and some neighboring TCs are connected by SSVR (Figure 4).
If the mode parameters in the network node deviate from the permissible (or specified by the operator), the SSVR ICS must send a signal to the TCS about the need for regulation. The effectiveness of the control system commands depends on the quality and completeness of the initial information about the network operation mode. The SSVR is capable of measuring the following parameters [5]:
- the RMS value of phase voltage before and after SSVR installation point;
- the effective value of the phase current in the line with SSVR;
- the phase angle of the line current relative to the voltage.
When information about deviations of the parameters and corresponding node number is obtained, it is possible to make decisions about control actions in order to bring these parameters to the expected values. The SSVR can regulate the amount of current in the line by controlling the magnitude of the phase voltage and its phase angle.
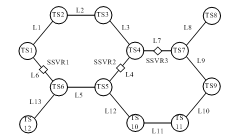 Figure 4: Graph of distribution electric network: L – power line; TS – transformer substation 6-20/0.4 kV; SSVR – solid state voltage regulator
Figure 4: Graph of distribution electric network: L – power line; TS – transformer substation 6-20/0.4 kV; SSVR – solid state voltage regulator
4.2. Cluster Management Algorithm
To implement the adaptive network control algorithm, a logical computing cluster is formed on top of the electrical distribution network. This cluster formed of industrial computers, each of which controls its own separate SSVR, and is a control network node. It is assumed that all nodes in the cluster can communicate with each other without loss and without delay.
Cluster parameters are controlled by the cluster leader, which task is to control the power flows between the parts of the electrical network by changing the parameters of the cluster nodes. The leader is an arbitrary cluster node, chosen by voting between all cluster nodes, using the Raft consensus algorithm (consensus problem) [17].
The advantages of Raft are reliable leader election and guaranteed delivery of broadcast messages from the leader to the nodes. Despite its relative simplicity, Raft provides a safe and efficient implementation of a state machine on top of a clustered computing system. Raft ensures reliable delivery of signals to all nodes in a given order [18]. This ensures the transition of all state machines through the same sequences of states and each node is guaranteed to come into agreement with the other nodes.
Raft has the following features:
- assumes that there is always only one clearly distinguished leader on the cluster. Only this leader sends new records to other nodes in the cluster. Thus, the rest of the nodes follow the leader and do not interact with each other (except for the voting phase). If an external client connects to the cluster through a regular node, then all his requests are redirected to the leader and only from there come to the nodes.
- involves the decomposition of the cluster management task into several subtasks, the main of which are: leader election (voting) and replication of logs. Each of these tasks allows a more detailed separation. This makes the algorithm easier to understand and reduces the risk of errors in its implementation.
- logs cannot contain gaps. Records are added strictly sequentially. This simplifies the algorithm very much. In addition, the specifics of applied tasks, most often, do not allow correct work with logs containing gaps.
- allows to change easily the configuration of the cluster without interrupting operation: add or remove nodes.
An important circumstance is that Raft numbers strictly all records in the log. The records must go strictly sequentially. These records numbers play an important role in the operation of the algorithm. They determine the degree of relevance of the state of the node. The leader is always the most relevant node. The same numbers are used to number voting sessions. A node can vote only once for each vote request.
4.3. Network Control Algorithm
The network control algorithm is iterative. Each iteration of the algorithm consists of several steps:
- Each node reads its own voltage, phase and current values. Then, the parameter values are analyzed according to the specified criteria. The criteria include the maximum power flow through the node and the ability to share the load with an adjacent part of the network. The criteria are formed separately for each cluster node.
- The desired correction of the parameter values of each node is formed according to the calculation results, and then the desired parameters are transmitted to the cluster leader.
- After receiving the current values from each cluster node, the leader decides to change values on one of the nodes.
- It is assumed that the parameters should be changed iteratively and sequentially, by a small value and only at one node per iteration. The leader selects the node with the maximum required parameter correction among the nodes and sends a request to this node to change the parameter value by a certain step. The size of the step is set by the cluster settings.
- One of the cluster nodes receives a request from the leader to change his operating parameters, makes these changes and sends a message to the leader that the changes were successfully made. This concludes the iteration of the algorithm.
The indication that the node parameter values have been corrected is the change in the iteration number field. If the value of the iteration number is greater than the current number (on the leader’s side), then the leader concludes that the node has recalculated the corrections of its parameters and sent updated values. Then the leader collects analysis data from all cluster nodes again. If changes in the correction of parameter values from the nodes are received, then the leader increments its current iteration number and repeats the steps to analyze and change the data.
Thus, at each iteration of the algorithm, small changes are made in the operation of the network at one of its nodes. Due to the fact that changes are made in the operation of only one node, and by a small value, the operation of the algorithm is stable and predictable and does not lead to an imbalance in the network.
Fault tolerance of the algorithm is achieved due to the fact that all network elements are combined into a cluster and each member of cluster is equal. The cluster leader which makes decisions about network management is unknown in advance and is chosen randomly from all the cluster members. That is, each cluster element contains all the necessary logic in order to become a leader, if the other members of the cluster elect it. The leader election procedure is finite and fault-tolerant, and is supported by the proven algorithm in cluster computing – Raft.
If the current cluster leader becomes unavailable due to problems in network connectivity and/or software or hardware failures, the cluster elects a new leader and the algorithm continues to work. If too many members drop out of the cluster due to possible failures, the algorithm determines that it does not have enough quorum to make decisions about network management and stops. In this case, a failure notification is sent to the operator.
The software simulation model of the SSVR ICS has been developed to study the operation of SSVR control algorithms in normal and emergency modes of network operation.
5. SSVR ICS Simulation Model
The simulation model allows to study the operation of the SSVR ICS in isolation without a real connection to the SSVR and without real communication channels. The software simulation model emulates the following objects and parameters:
- SSVR as ModBus slave [19];
- communication channels between SSVR and ICS;
- the topology of a network consisting of a set of SSVR ICS, with a set of communication channels connecting them.
The structural diagram of the simulation model is shown in Figure 5.
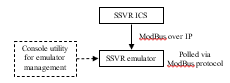 Figure 5: The structural diagram of the simulation model
Figure 5: The structural diagram of the simulation model
The SSVR emulator has been written in C++ and is a Linux daemon (a background program launched by the operating system). The main task of the SSVR emulator is to respond to the requests of the ICS via the ModBus-over-TCP/IP protocol, just like a real SSVR does. The used implementation of the ModBus protocol defines a set of integer registers. For each of these registers in the SSVR emulator, a range of acceptable values and a period of values change are determined.
During its operation the SSVR emulator determines randomly the value of each register based on its range of changes, and gives it to the ICS in response to its requests. Also, the SSVR emulator changes the value of each register once per period. It is possible to change dynamically the settings for each ModBus register of the SSVR emulator without restarting the emulator itself using the console utility for the dynamic configuration of the emulator.
A configuration file with the network parameters of the available nodes in the topology is created for an instance of the SSVR ICS software module to organize communication channels with other ICSs in the topology.
The console utility is used to change dynamically the settings for each ModBus register in the SSVR emulator without restarting this emulator, as well as to simulate changes in the network parameters and the occurrence of various emergency situations. So, for example, using this utility, it is possible to simulate the connection of an additional load to the SSVR by changing the values of the voltages and currents on the side after the controller.
6. SSVR ICS Simulation Model
Operating modes (scenarios) of the control network were simulated using the developed simulation model of the IСS SSVR. The cluster nodes were switched off one by one and the operation of the algorithm was monitored along with messages sent to the network operator.
The algorithm of actions of the control system when starting the system and the occurrence of emergency situations is shown in Figure 6.
Voting between the cluster nodes and the leader elections occurs when the ICS is turned on. Normal operation of ICS SSVR is ensured when two groups of conditions are met:
- the cluster is working correctly;
- the control algorithm works correctly.
The cluster works correctly when the following conditions are met:
- there is a cluster quorum nq – the number of nodes in the cluster is sufficient to elect the leader (the minimum required number nmin = 3);
- the chosen leader is functioning normally;
- the set of nodes that have elected a leader is stable.
Algorithm quorum – there is a specified minimum number of controlled nodes which is necessary for the algorithm to work correctly.
Each time an alarm message is received indicating the nature of the problem, the operator must perform the required recovery and restart the system.
The simulation results are presented in Table.
The control system coped with the assigned tasks both in normal and emergency modes of operation. It was found that depending on the number and quantity of disconnected nodes two scenarios are possible:
- in scenarios B1 and C1, the remaining number of nodes was enough to select a leader, the system continued to work and perform the declared functions until the accident was eliminated;
- in scenarios B2, C2, D and E, the election of a new leader is impossible and the cluster stops its work until the accident is eliminated and the operator restarts the control algorithm.
 Figure 6: The control system algorithm: the letters A, B, C, D, E indicate the scenarios presented in the Table 1
Figure 6: The control system algorithm: the letters A, B, C, D, E indicate the scenarios presented in the Table 1
 Figure 7: The dependence of the probability of cluster accessibility on the duration of the time interval between processing requests for a different number of network nodes
Figure 7: The dependence of the probability of cluster accessibility on the duration of the time interval between processing requests for a different number of network nodes
7. Determining the Cluster Speed Limit
The iterative control algorithm involves sending requests for data changes to the cluster. Sending commands takes some time, determined by the speed of the industrial computer of the node.
An experimental study on simulation models including 3, 6 and 12 nodes was carried out to determine the minimum cluster response time. Figure 7 shows the dependence of the probability of cluster accessibility on the duration of the time interval between processing requests.
Table 1: Modeling Results of Normal and Emergency Operation of the Control Network
| Scenario | Result | Messages to operator |
| Scenario А.
Normal network operation. No accidents. |
The network topology does not change.
The leader is chosen and does not change. There is a periodic measurement and iterative correction of the parameters of the nodes. |
No messages |
| Scenario B.1.
One of the nodes is down. The remaining number of nodes is sufficient for the operation of the cluster or for a quorum for a leader election. |
The cluster continues its work according to the algorithm. | Alarm message indicates the ID of the node requiring recovery. |
| Scenario B.2.
One of the nodes is down. One of the nodes is down. The remaining number of nodes is not sufficient for the operation of the cluster or for a quorum for a leader election. |
The cluster stops its work. | Alarm message indicates the ID of the node requiring recovery. |
| Scenario С.1.
The leader node is not working. The remaining number of nodes is sufficient for a quorum for voting |
Election of a new leader. | Alarm message indicates the ID of the node requiring recovery. |
| Scenario С.2.
The leader node is not working. The remaining number of nodes is not sufficient for a quorum for voting |
The cluster stops its work. | Alarm message indicates the ID of the node requiring recovery. |
| Scenario D.
No cluster quorum |
The cluster stops its work. | Alarm message indicates the number of nodes. |
| Scenario E.
The failure of one or more nodes led to the division of the network into two areas (partitions) |
The cluster stops its work. | Alarm message indicates the ID of the node requiring recovery. |
One can conclude that with an increase in the number of nodes in a cluster, the minimum allowable time interval between requests increases. From the given dependencies, it can be seen that the minimum interval between requests is 2.5 seconds for networks with a number of nodes up to 6 and 7 seconds for networks of 12 nodes. Such an interval is acceptable when regulating power flows in the electrical distribution network.
8. Conclusion
Decentralized management system architecture and an adaptive network control algorithm have been developed for solid-state voltage regulators (SSVR) in medium voltage distribution networks.
All SSVRs are combined into a single logical computing cluster using industrial computers, which are controlled by the cluster leader. The Raft consensus algorithm is used to find a leader and manage the entire cluster.
In the course of researching the control system on the simulation model, all cluster nodes were switched off one by one. In all simulated scenarios, the control system acted according to the laid down algorithm and followed the given commands. The research results confirmed the efficiency of the developed algorithm and the stability of its functioning.
Modeling clusters with different numbers of nodes showed that the minimum allowed time between requests for cluster nodes depends on its size. Thus, it is possible to determine the maximum allowable number of nodes in a cluster which will depend on the network topology and the tasks solved by the SSVR. The study of the performance of the algorithm proves the possibility of its application to solve the problem of power flow control in medium voltage distribution networks.
Conflict of Interest
The authors declare no conflict of interest.
Acknowledgment
The study was carried out with a grant from the Russian Science Foundation (project No. 20-19-00541).
- A. Huang, “FREEDM system – a vision for the future grid,” in IEEE PES General Meeting, 1–4, 2010, doi:10.1109/PES.2010.5590201.2.
- Y.R. Kafle, K. Mahmud, S. Morsalin, G.E. Town, “Towards an internet of energy,” in 2016 IEEE International Conference on Power System Technology (POWERCON), 1–6, 2016, doi:10.1109/POWERCON.2016.7754036.
- E.N. Sosnina, A.I. Chivenkov, I.A. Lipuzhin, “Solid-State voltage regulator for a 6–10 kV distribution network,” in 2018 International Multi-Conference on Industrial Engineering and Modern Technologies (FarEastCon), 1–7, 2019, doi:10.1109/FarEastCon.2018.8602948.
- Y.P. Kubarkov, A.V. Chivenkov, N.N. Vikhorev, V.V. Shalukho, I.A. Lipuzhin, “Algorithm of power line current formation at load node,” Vestnik of Samara State Technical University. Technical Sciences Series, 1(61), 128–138, 2019, doi:10.14498/tech.201901128-138 (article in Russian with an abstract in English).
- E.N. Sosnina, A.I. Chivenkov, I.A. Lipuzhin, N.N. Vikhorev, “Control system for vector regulation of power flows in medium voltage network,” IOP Conference Series: Materials Science and Engineering, 643, 012048, 2019, doi:10.1088/1757-899X/643/1/012048.
- N. Ji, S. Geiger, “Reducing outages in distribution by testing recloser controls,” in 2014 China International Conference on Electricity Distribution (CICED), 1748–1788, 2014, doi: 10.1109/CICED.2014.6992261.
- V. Sharipov, A. Minin, I. Mokhov, “A protection strategy for power grids equipped with Siemens vacuum reclosers,” in 2010 Innovative Smart Grid Technologies (ISGT), 1–5, 2010, doi: 10.1109/ISGT.2010.5434741.
- W. Li, Y. Li, C. Chen, Y. Tan, Y. Cao, M. Zhang, Y. Peng, S. Chen, “A full decentralized multi-agent service restoration for distribution network with DGs,” IEEE Transactions on Smart Grid, 11(2), 1100–1111, 2020, doi: 10.1109/TSG.2019.2932009.
- C. Ien, D. Botting, A.D.B. Paice, J. Finney, O. Preiss, “When grids get smart,” ABB Review, 1, 44–47, 2008.
- L. Strezoski, I. Stefani, B. Brbaklic, “Active management of distribution systems with high penetration of distributed energy resources,” in IEEE EUROCON 2019 -18th International Conference on Smart Technologies, 1–5, 2019, doi:10.1109/EUROCON.2019.8861748.
- D. Ongaro, J. Ousterhout, “In search of an understandable consensus algorithm,” in 2014 USENIX Annual Technical Conference, 305–319, 2014.
- C. Burgos-Mellado, J. Llanos, E. Espina, D. Saez, R. Cardenas, M. Sumner, A. Watson, “Single-phase consensus-based control for regulating voltage and sharing unbalanced currents in 3-wire isolated AC microgrids,” IEEE Access, 8, 164882–164898, 2020, doi: 10.1109/ACCESS.2020.3022488.
- C. Burgos-Mellado, J. J. Llanos, R. Cardenas, D. Saez, D. E. Olivares, M. Summer, A. Costabeber, “Distributed control strategy based on a consensus algorithm and on the conservative power theory for imbalance and harmonic sharing in 4-wire microgrids,” IEEE Transactions on Smart Grid, 11(2), 1604-1619, 2020, doi: 10.1109/TSG.2019.2941117.
- B. S. Millar, D. Jiang, “Asynchronous consensus for optimal power flow control in smart grid with zero power mismatch,” J. Mod. Power Syst. Clean Energy, 6, 412–422, 2018, doi.org/10.1007/s40565-018-0378-4.
- K. Zhang, D. Recalde, T. Massier, T. Hamacher, “Fast online distributed voltage support in distribution grids using consensus algorithm,” in 2018 IEEE Innovative Smart Grid Technologies – Asia (ISGT Asia), 350–355, doi: 10.1109/ISGT-Asia.2018.8467821.
- A. Sheoran, V. Singh, “Consensus based Anomaly detection in Smart Grid,” Fault-tolerant computer system design. Final project report. https://engineering.purdue.edu/ee695b/public-web/handouts/Projects/Reports/amit_vishwanath_smartgridsecurity.pdf.
- The Raft Consensus Algorithm. [Online]. URL: https://raft.github.io.
- C. Fluri, D. Melnyk, R. Wattenhofer, “Improving raft when there are failures,” in 2018 Eighth Latin-American Symposium on Dependable Computing (LADC), 167–170, 2010, doi:10.1109/LADC.2018.00028.
- libmodbus. A Modbus library for Linux, Mac OS X, FreeBSD, QNX and Win32. [Online]. URL: http://libmodbus.org.
No related articles were found.