Investigating Students’ Computational Thinking through STEM Robot-based Learning Activities

Adv. Sci. Technol. Eng. Syst. J. 5(6), 1366–1371 (2020);
 DOI: 10.25046/aj0506164
DOI: 10.25046/aj0506164
Nowadays, robots are an important learning tool in education and are increasingly used inside and outside the classroom to foster the development of students’ knowledge, skills, and attitudes connecting to a real-world situation. In past years, using robots in STEM (science, technology, engineering, and mathematics) education has been proposed as one of the strategies to integrate the different fields in order to construct more effective projects and innovations. Especially, engineering is the combination of math and science in solving a problem. Nevertheless, students could not understand and appreciate how to apply the knowledge of interdisciplinary integration to operate certain tasks by the engineering method. This research article presents STEM robot-based learning activities (STEM-RoLA) with sixty high-school students who were studying science and engineering. The obtained results show that the proposed STEM-RoLA is beneficial for students, especially when compared with high and low robotics performance students. The results found that high robotics performance students have higher computational thinking than low robot performance students, and they have a positive engagement response in the learning activity.
1. Introduction
At present, there is a proposal to increase robot usage in educational establishments undoubtedly because the robots have been integrated into the learning process to encourage students to think and connect to a real-world situation. Hence, using robots for education has gained a lot of attention from researchers and educators. This paper is an extension of work originally presented in the 7th International Congress on Advanced Applied Informatics (IIAI-AAI 2018) [1].
Nowadays, many studies focus on educational robots that help students develop essential skills inside and outside the classrooms that are significant in connecting the concept to real-life. Moreover, the learning activities were designed in consideration of promoting STEM discipline (Science, Technology, Engineering, and Mathematics) with a challenging learning mission in different situations [2]. Computational thinking (CT) is one of the essential core skills for students in the 21st century that is often regarded as the basic skill of computer science. CT is a kind of analytical thinking that uses the general way of thinking mathematically to solve real-life situations with scientific thinking [3]. The robot kit is a learning tool for use in the educational system, it is easy to use for students and enables them to have hands-on experience of activities and allows for a number of challenges for students to give them opportunities of robotics experience [4].
In the education context of Thailand, the students in high school have learned various subjects independently, such as Science (Physics, Chemistry, Biology, Mathematics), and Computer Programming. However, they may not understand how to apply the knowledge of interdisciplinary integration to perform or operate certain tasks in the engineering process [5].
The Thai government has attempted to push STEM education to enhance learning seamlessly for a new generation of students. Also, with the growing interest in STEM, educational robots have several benefits. Many educators have indicated that STEM integration would help enhance engineering students’ learning performance with a flexible learning process. Besides, using appropriate robotics-based STEM activities can be an effective way to introduce students’ thinking to operate tasks systematically [6].
With the swift development of the field of robotics, it was proposed that robotics not only engage in active learning environments but also develop computational thinking knowledge and skills for students [7]. Of course, educational robotics was popular to bring an adaptive instrument for learning. Therefore, the robotics has been to promote STEM content, innovation, and creativity among students through an educational robotics competition [8].
This learning activity has integrated the benefits of robotics with the STEM education framework to promote senior high school students’ computational thinking with the learning engagement process of students that was held outside the classroom for three days. This study aims at addressing the following research study:
- Do students who participate in STEM robot-based learning activities have computational thinking?
· What are the students’ engagements in the STEM robot-based learning activities?
2. Literature Review Literature Review
2.1. Using Robots in Education
Robotics is a branch of engineering that includes a variety of subject matters that combine with STEM disciplines (science, technology, engineering, and mathematics). A robot is a machine applied in a variety of tasks such as industrial systems, medicinal purposes, and educational tools. Too many researchers state that educational robotics is a core element when STEM is a significant tool to integrate into the curriculum for students in the 21st century. A recent study has found that using a robot in education is increasingly being defined as an excellent instrument of teaching and learning that integrates STEM education, which is crucial for the future success of students [9].
Many studies proposed the benefit of an educational robot able to motivate students’ learning with authentic learning activities based on real-world problems [10-11]. In [12], the author proposed robotic cooperative learning to promote students’ critical thinking, and STEM interest indicates that students participating in robotic service-learning can benefit from this experience. Besides, robot hands-on activities can be easily adopted in classrooms to connect interdisciplinary core ideas for engineering design and STEM learning [13-14]. A robot in education can be used not only inside and outside of the classroom but also in meaningful learning activities for students as well.
Robotics makes the students able to connect and find relevance in the experience, together with the complexity of the global situation. So, it can be suggested that this is how to apply the concept of a robot for enhancing computational thinking skills.
2.2. Computational Thinking
The computational thinking basis concept of mathematics education research by Seymour Papert [15] proposed the aspects of computation that are: how to use computation to create new knowledge; how to use computers to enhance thinking and how to change patterns of access to knowledge. There is the basic concept that using technology can provide new ways to learn and teach with the logical thinking process. After that, computational thinking was described often by many researchers worldwide. In the last twenty years, computational thinking has become a fundamental skill for everyone in every field, not just for computer scientists, especially for students in the 21st-century who need skills such as analytical ability, reading, writing, and arithmetic to be processed systematically.
Based on the core concepts of computational thinking as a fundamental skill for everyone’s analytical ability along with reading, writing and arithmetic, in [16], the author proposed that these should include decomposition, pattern recognition, abstractions, and algorithm design. In [17], the author classified computational thinking core components into three dimensions, including computational concepts which focus on the concepts that students employ when they are learning. Computational practices focus on problem-solving practices that occur in the learning process. Computational perspectives focus on the students’ understanding of themselves and can connect learning with the world around them.
Measuring students’ computational thinking is complicated, but it is a necessary task for understanding the effectiveness of the STEM-RoLA project. Our investigation focused on the implications of claims about three computational thinking dimensions consisting of computational concepts: the scientific concepts that students employ to learn and understand during activities, computational practices: problem-solving practices that occur in the learning process, and computational perspectives: students’ understanding of themselves and the relationships between group members.
3. Methodology
3.1. Participants
The study was implemented in a public school in central Thailand. We selected a curriculum that prepares all students to be a scientist or an engineer. The participants in this study were sixty high school students, grades 10-12 (all males). The students were separated into twenty groups, so that each group had three members, and they learned and worked together in those groups.
3.2. Instruments
- The items in this observation checklist were developed to the three dimensions of computational thinking that cover all concepts of the robot activities including fourteen items: computational concept (4 items), computational practices (5 items), and computational perspectives (4 items). For this observation checklist, the mentors have rated the students on a 5-point Likert scale (1 = Failed, 2 = Passed, 3 = Acceptable, 4 = Good, 5 = Excellent). The scale validity was evaluated by five professors and teachers of educational robotics with more than seven years of experience. The internal consistency for the overall scale was 0.82.
- The items in this engagement questionnaire were adopted from a revised version in [5]. There are three dimensions of students’ engagements after attending the robot learning activity that consist of eleven items asking about students’ experiences toward STEM-RoLA. Three dimensions included behavioral engagement (3 items), cognitive engagement (4 items), and emotional engagement (4 items). The Likert scale is a five-point scale that allows the individual to express how much they agree or disagree with each item (1 = Strongly Disagree, 2 = Disagree, 3 = Neutral, 4 = agree, 5 = Strongly Agree). The internal consistency for the overall scale was 0.79.
3.3. Robot-based learning activity
The commercial robotic kits chosen in this study were mBot platform that operates and engages the students’ learning experience of the mechanics, electronics, control systems, and computer programming [18]. The mBot is the easiest educational robot kit for student learning in robotics. The robot shape is easy to assemble and contains approximately 45 pieces in total, so students have a sense of achievement when they are able to assemble it quickly.
Normally, the components of mBot included the body, main control board, sensors, communication (Bluetooth), and power supply (battery). Also, it has three pre-set control modes of supporting student learning, consisting of obstacle avoidance mode, line-follow mode, and manual control mode. The students could feel that they had achieved and feel proud when they could program the mBot easily without writing difficult codes and language.
In addition, mBlock is a block-based coding platform for Scratch programming. It is easy-to-use software that makes teaching and learning coding fun and interactive. Scratch 2.0 is a very popular graphical logical programming software for teachers and students’ learning. It has been proved to be one of the easiestto use graphical programming tool. Therefore, we have appled mBlock software to use Scratch coding to program Arduino and robots. Also, graphical programming is a visual programming technique where visual block connections are used for a student to code instead of texts, making it easy for non-coders to implement algorithms. It plays a meaningful role in enhancing computational thinking in the learning process.
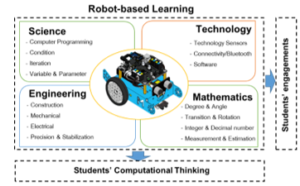
Figure 1: The STEM robot-based learning framework
Figure 1 shows the overall research of STEM-RoLA. We attempted to design the learning activity with STEM integrated. The students have learned about the mBot kits in a stepwise manner that describes its components with scientific understanding.
To achieve the tasks in this learning activity, students are encouraged to employ knowledge, skills, experience, and a teamwork process based on three dimensions of computational thinking:
- Computational thinking concepts, the students employ the knowledge when they code or control the robot for operating the mission and competition.
- Computational thinking practices, the students solve the problems that occur in activities: experimenting, iterating, and testing.
- Computational thinking perspectives, the students’ understanding of themselves and their relationships with a group member.

Figure 2: The steps of STEM robot-based learning activity
To be an effective activity, we provide mentors who are pre-service engineering teachers. The mentor will help students while they work in a group during the activity. The mentors can provide technical consultation and can be a source of support when students need it most. For the time being, each group has to come up with better solutions by integrating the knowledge of STEM and robotics, while their computational thinking is promoted accordingly.
The eight-steps to facilitate their learning process with hands-on experience lasts approximately twenty-one hours as follows:
- Step 1: Robot introduction: the first step addresses motivation to student-related robots that are important in daily life. After that, they introduce the functions of the robot and the introduction of the robot’s components based on the engineering design process. At this moment, the students have to get acquainted with the robot components through several mini-labs such as the main control board, sensors, communication options (USB cable, Bluetooth, Wireless), and power supply (battery). In addition, the robot has three different modes of functionalities.
- Mode A – Remote control driving or mobile device: the robot can be controlled by arrow buttons on the device to drive it forwards and backwards as well as to turn left or right.
- Mode B – Obstacle avoidance: the robot is driven forward on its own until it detects an obstacle. If the robot detects an obstacle, it turns then continues driving forward.
- Mode C – Line following: the robot drives forward while following a line
- Step 2: Robot assembly: The students were separated into twenty groups (3 students per group) then students of each group worked together. They can be learning at their own pace with support from the group mentor. This step requires students to get acquainted with each part and start to join each part together by robot function. Then, they learn three pre-set modes consisting of IR control mode, obstacle avoidance mode, and line-following mode. After that, they get the robot started by pressing on-board and push the button to change the mode.
- Step 3: Primary programming: the students can learn an easy programming language to control the robot. They use mBlock based on Scratch 2.0 software that is graphical programming for writing on a laptop or personal computer. The student receives the coding questions for programming practice. For example, how to control the robot to move forward or to turn left or right. They can drag the module block to move the robot area. During this step, the students in each group must analyze the facing proposition and situation in which they require to test-run-revise the code in a stepwise manner.
- Step 4: Robot in the field: the students from each group work together on the given tasks, a range of tasks designed to test the robot in the field. Each group has to adapt the physical robot as well as the programming instructions to overcome different challenges. This step is the basis for improving reliable robot working. The robot was assembled by students who programmed it to perform certain tasks and then there is the testing to operate, prove system functionality, and gain confidence that a system will perform as expected. Testing in the field also allows the student to learn the weaknesses, problems, and constraints of the robot and improve upon them.
- Step 5: Robot mission: the students learned to analyze and solve the problems in a logical way by taking the knowledge integration of STEM. The adjustment of one point will affect the related points. In this step, each group is faced with different problems in their robot’s settings and programming. For example, the robot starts to move at a certain speed. When there is a barrier in front, the robot will turn right; when there is not, the robot keeps moving forward.
- Step 6: Sharing: The students have opportunities to share knowledge. What they have learned about each other helps build positive thinking. The representative student presents ideas to organize and control the robot to carry out each task in the missions. The students in each group help to justify the approach to solving the problems and present their ideas.
- Step 7: Practice before the battle: the students in each group have a rehearsal before the competition. They have analyzed and discussed opportunities and weaknesses to compete in the competition. This will increase their team’s confidence in the final robot, while the final configuration may be needed. They receive the robot tasks for learning line-follow and obstacle avoidance and find a solution and strategy for solving the problem. For example, the students have learned how to program robots to take one step at a time. Meanwhile, students get to know the mechanical structure and understand how to control a robot.
- Step 8: The robot competition: the robot competition requires students to control the robot that makes learning robot programming simple and fun. The student members in each group are encouraged to apply knowledge of what they have learned to accomplish the goal effectively on the robot competition. There are two separate modes, including an autonomous robot following a task and a control robot via a mobile application on the Balloon Battle Game. They have to use the Makeblock open-source to control the robot with a mobile device, as shown in Figure 3.
Figure 3: Illustration of a robot controlled by a mobile device
This moment is vital to each group since the robot’s performance during rehearsal may be ineffective when competing with others. For this step, each robot has a needle and a balloon attached to the front and back of its body. Then each group’s robot tries to stab the balloon’s competitor while maintaining their attached balloon. The loser is eliminated from the competition. For the final of the competition, each qualified group has ten minutes to come up with a better strategy for controlling the robot in a battle while maintaining their balloons. The last group to have a balloon at the end of the competition is the winner.
4. Findings
To understand better the effects of this part of the study, we compared the results with two separate groups of students’ data consisting of a tasks score (30 points) and the robot competition score (70 points) total 100 points. Therefore, twenty groups demonstrated the difference between a high robotics performance group (HIRP) for the top ten groups with M=79.00 (SD =12.10) and a low robotics performance group (LORP) for the bottom ten groups. These were elaborated with M= 29.50 (SD =2.69). The findings related to the research questions were demonstrated.
4.1. The students’ computational thinking
To analyze the differences between the students’ robotics performances in two groups of three computational thinking components included computational thinking concepts (CTC), computational thinking practices (CTP), and computational thinking perspectives (CTPP), and these are shown in Table 1.
Table 1: Means and SDs of the students’ computational thinking
| CT
Component |
LORP | HIRP | ||
| M (SD) | Remark | M (SD) | Remark | |
| CTC | 4.01 (0.72) | Good | 4.13 (0.22) | Good |
| CTP | 2.88 (0.74) | Acceptable | 4.75 (0.43) | Excellent |
| CTPP | 3.25 (0.83) | Acceptable | 4.13 (0.54) | Good |
As the descriptive statistics in Table 1 show for the proposed STEM-RoLA in computational thinking concepts (CTC), both the HIRP and LORP students have concepts of the robot at a good level with M = 4.01 (SD = 0.72), and M = 4.13 (SD = 0.22), respectively.
Based on the results in computational thinking practices (CTP), the HIRP students performed tasks in each mission at an excellent level (M = 4.75, SD = 0.43), better than the LORP students at an acceptable level (M = 2.88, SD = 0.74).
Furthermore, in computational thinking perspectives (CTPP), the HIRP students tended to have positive perspectives at a good level (M = 4.13, SD = 0.22) while those who were LORP students, it was at an acceptable level (M = 3.25, SD = 0.83).
4.2. The term of students’ engagements
The students’ engagement results were analyzed based on quantitative and qualitative data for proposing STEM integrated robotics learning. We have presented three different aspects consisting of behavioral, cognitive, and emotional engagement as presented in Table 2.
In the first dimension, the HIRP students revealed behavioral engagement in that they could manage the function of members and have confidence in learning (M=4.63, SD=0.53). The entry indicated that the HIRP students were good at time management and working well together, as they expressed during the interviews, for example:
Table 2: Means and SDs of the students’ engagements
| Component | LORP | HIRP | ||
| M (SD) | Remark | M (SD) | Remark | |
| Behavioral | 4.32 (0.77) | Agree | 4.63 (0.53) | Strongly Agree |
| Cognitive | 4.47 (0.64) | Agree | 4.45 (0.67) | Agree |
| Emotional | 4.40 (0.71) | Agree | 4.62 (0.51) | Strongly Agree |
“Through this activity, we helped in my group about the coding program and explained to each other. I think I have learned a lot about cooperation and teamwork. I attend a robot activity with my friends, it made me have so much fun.” (Student A)
“I am so excited about the robot because it is admirable to have this experience that I can construct a robot by myself. Besides, we have an opportunity to cooperate and share the ideas for working.” (Student B)
While the LORP students had trouble with cooperating and working together, they did not enjoy learning in a group with members very much, and they had less time because they could not manage time (M=4.32, SD=0.77), for example:
“In my group, we have many members, so somebody does not involve in some activities. We can’t organize the tasks and events on time.” (Student C)
“I have less time to work on many tasks. It must spend a lot of time to solve the problems. Sometimes, I think I like to work without my friends.” (Student D)
For cognitive engagement, the entry indicated that the HIRP students can reflect higher thinking skills on applications in their daily lives (M=4.45, SD=0.67), for example:
“I apply multiple tasking skills, and I can try when not sure. It is important to know how to employ the basic engineering principles for this activity.” (Student A)
“For this activity, I think I have a thinking process and much knowledge I play it again when I come back home. Unfortunately, while I have learned a lot of programming, I never took any classes on robotics” (Student B)
While the LORP students just reflected what they had experienced from the activity by putting more effort before the success (M=4.47, SD=0.64), for example:
“I am upset about how to complete the work. However, I think I attempt to find the solution myself.” (Student C)
“In the activity, I do not plan, it’s not a success. I have attempted, but still failed, again and again, so I consulted the mentor.” (Student D)
In the end, the HIRP students have emotional engagement. They enjoyed the learning activities (M=4.62, SD=0.51), especially the students in HIRP who have positive responses such as:
“I think it could be an interesting experience. I like to control a robot to follow my instructions. Each task, I am quite confident that a robot can do some pretty fun stuff.” (Student A)
“I very enjoyed the activities in the activity because I think a robot can be a good assistant in the future. It helps me to be more productive in performing daily activities.” (Student B)
On the other hand, the LORP students did not concentrate on some activities. However, they exposed their emotions towards the assistance of peer members in the group that could encourage them to proceed with the tasks. So, they have an attitude towards this (M=4.44, SD=0.71), as they expressed during the interviews, for example:
“I think a robot is difficult to use because it was always programmed. I’m running into a lot of infrared sensor issues. I’m attempt to do the typical line follower activity and also go ahead and stop when it finds a black line.” (Student C)
“This activity was held during the semester. I have a lot of homework, so I don’t concentrate on some activities. I think it should be held in my free time.” (Student D)
There was unanimous agreement from the students present that, as a result of this robot activity, the students had significantly developed their computational thinking to solve the problems and challenges, their ability to work as a group, and their resilience. Also, students said they greatly enjoyed participating in the challenges and wanted more opportunities to participate in such STEM-RoLA.
5. Conclusions
Within Thailand’s educational context, the integration of interdisciplinary knowledge to enhance crucial skills thinking, and a positive attitude are also important to realize goal. So the robotics STEM was integrated through active learning and the new learning tool has an effective strategy. The robotics challenges allow students to grasp the fundamentals of basic programming and develop their computational thinking with STEM education in an engaging way. The STEM-RoLA was held to motivate the senior high school students in three days (21 hours), consisting of eight steps in total, from robot introduction, assembly, programming, testing in the field, robot mission, sharing, practice before the battle, and final robot competition. The students established their robotics knowledge with hands-on experience based on the STEM strategy. Therefore, the obtained results show that the proposed STEM-RoLA is beneficial for the students, especially when compared with high and low robotics performance students. The results find that high robotics performance students have higher computational thinking than low robotics performance students. Also, they have positive engagement responses to the learning activity.
Nevertheless, the learning activities have shown that there are some limitations due to the availability of the school context, the information, and the educational context students already have before they learn robot information that might affect effectiveness. Also, the number of robot kits are quite expensive and inflexible to learning in some contexts. Future studies may explore whether there are specific learning strategies and learning tools that are particularly useful based on the attitudes of the students. Based on the result, the present research involved all males. So, future studies should clarify the results that can be described by gender differences in learning outcomes and assess the long-term effects on attitudes.
Acknowledgment
This study is supported in part by King Mongkut’s University of Technology North Bangkok.
- S. Chookaew, S. Howimanporn, P. Pratumsuwan, S. Hutamarn, W. Sootkaneung, & C. Wongwatkit, “Enhancing High-School Students’ Computational Thinking with Educational Robotics Learning” in 2018 International Congress on Advanced Applied Informatics (IIAI-AAI), 204-208). 2018, doi:10.1109/IIAI-AAI.2018.00047.
- T. J. Kopcha, et al. “Developing an integrative STEM curriculum for robotics education through educational design research” Journal of Formative Design in Learning, 1(1), 31-44, 2017, doi.org/10.1007/s41686-017-0005-1
- J. M. Wing, “Computational thinking” Communications of the ACM, 49(3), 33-35, 2006.
- B. Zhong, Y. Wang, “Effects of roles assignment and learning styles on pair learning in robotics education” International Journal of Technology and Design Education, 1-19, 2019, doi.org/10.1007/s10798-019-09536-2
- S. Hutamarn, S. Chookaew, C. Wongwatkit, S. Howimanporn, T. Tonggeod, S. Panjan, “A stem robotics workshop to promote computational thinking process of pre-engineering students in Thailand: STEMrobot” in 2017 International Conference on Computers in Education, 514-522, 2017.
- C. Chalmers “Robotics and computational thinking in primary school” International Journal of Child-Computer Interaction, 17, 93-100, 2018, doi.org/10.1016/j.ijcci.2018.06.005
- E. B. Witherspoon, R. M. Higashi, C. D. Schunn, E. C. Baehr, R. Shoop, “Developing Computational Thinking through a Virtual Robotics Programming Curriculum,” ACM Transection on Computing Education, 18(1), 1–20, 2017, doi.org/10.1145/3104982.
- A. Eguchi, “RoboCupJunior for promoting STEM education, 21st century skills, and technological advancement through robotics competition,” Robotics and Autonomous Systems, 75, 692–699, 2016, doi.org/10.1016/j.robot.2015.05.013.
- T. Larkin, “Topic Order in Introductory Physics and its Impact on the STEM Curricular Ladder” International Journal of Engineering Pedagogy, 7(1), 136-150, 2017, https://www.learntechlib.org/p/207332/.
- C. Julià, J. Ò. Antolí, “Impact of implementing a long-term STEM-based active learning course on students’ motivation” International Journal of Technology and Design Education, 29(2), 303-327, 2019, doi.org/10.1007/s10798-018-9441-8.
- M. Barak, M. Assal, “Robotics and STEM learning: Students’ achievements in assignments according to the P3 Task Taxonomy—practice, problem solving, and projects” International Journal of Technology and Design Education, 28(1), 121-144, 2018, doi.org/10.1007/s10798-016-9385-9.
- P. Mosley, G. Ardito, L. Scollins, “Robotic cooperative learning promotes student STEM interest” American Journal of Engineering Education, 7(2), 117-128. 2016.
- S. Ziaeefard, M. H. Miller, M. Rastgaar, N. Mahmoudian, “Co-robotics hands-on activities: A gateway to engineering design and STEM learning” Robotics and Autonomous Systems, 97, 40-50, 2017, doi.org/10.1016/j.robot.2017.07.013.
- S. Chookaew, C. Silawatchananai, S. Hutamarn, S. Howimanporn, W. Sootkaneung, C. Wongwatkit, “An investigation of vocational students’ attitude towards STEM robotic activities” in 2019 International Conference on Computers in Education (ICCE) 134–138, 2019.
- S. Papert, “An exploration in the space of mathematics educations” International Journal of Computers for Mathematical Learning, 1(1), 95-123, 1996, doi: https://doi.org/10.1007/BF00191473.
- J.M. Wing, “Computational thinking and thinking about computing” Philosophical Transactions of the Royal Society A: Mathematical, Physical and Engineering Sciences, 366(1881), 3717-3725, 2008, doi.org/10.1098/rsta.2008.0118.
- K. Brennan, M. Resnick, “New frameworks for studying and assessing the development of computational thinking” in 2012 Annual Meeting of the American educational research association, Vancouver, Canada 1, 1-25, 2012.
- P.P. Merino, E. S. Ruiz, G. C. Fernandez, and M. C. Gil, “A Wireless robotic educational platform approach,” in 2016 International Conference on Remote Engineering and Virtual Instrumentation, 2016, pp. 145–152.