
Robust Static Output-Feedback Fault Tolerant Control for a Class of T-S Fuzzy Systems using Adaptive Sliding Mode Observer Approach
Volume 5, Issue 4, Page No 70-80, 2020
Author’s Name: Slim Dhahri1,2,a), Essia Ben Alaia1,3
View Affiliations
1Department of Computer Engineering and Networks, College of Computer and Information Sciences, Jouf University, Sakaka, 72388, Saudi Arabia
2Engineering Laboratory of Industrial Systems and Renewable Energies, National Higher School of Engineers of Tunis, Tunis University, Tunis, 1008, Tunisia
3Laboratory of Analysis, Conception and Control of Systems (LACCS), National School of Engineers of Tunis, Tunis El Manar University, Tunis, 1002, Tunisia
a)Author to whom correspondence should be addressed. E-mail: dhahri_slim@yahoo.fr
Adv. Sci. Technol. Eng. Syst. J. 5(4), 70-80 (2020); ![]() DOI: 10.25046/aj050410
DOI: 10.25046/aj050410
Keywords: TS fuzzy systems, Sliding mode observer, Fault estimation, Fault-tolerant control

Export Citations
In this paper, the problems of actuator and sensor fault estimation (FE) and fault-tolerant control (FTC) for uncertain nonlinear systems represented by Takagi-Sugeno (T-S) fuzzy models are investigated. First, a robust fuzzy adaptive sliding mode observer (SMO) is designed to simultaneously estimate system states and both actuator and sensor faults. Then, using the obtained on-line FE information, a static output-feedback fault-tolerant control (SOFFTC) is developed to compensate the fault effects and stabilize the closed-loop system. Moreover, sufficient conditions for the existence of the proposed observer and controller are given in terms of linear matrix inequalities (LMIs). The robustness against uncertainties is treated using the H∞ optimization technique to attenuate its effect on the estimation error. Finally, the simulation results of nonlinear inverted pendulum with cart system validate the e method.
Received: 09 April 2020, Accepted: 01 June 2020, Published Online: 06 July 2020
1. Introduction
Modern industrial systems are affected usually by various event of faults such as, loss of actuator effectiveness, failures or offsets of actuators/sensors, deviations of output measurement, etc. Indeed, the presence of fault causes an unacceptable performances of design controllers, thus deteriorating the overall system execution, and so leading to wrong dangerous situations.
Thus, it is important to encourage the development of research on fault tolerant control (FTC), which is divided on two types. The first one, the so-called passive FTC, is focused on to conceive a robust controller against disturbances and uncertainties. A key limitation is that the system stability cant be guaranteed in the presence of faults.
Nevertheless, based on online fault estimation (FE), such as the size and the shape, active FTC can develop robust controller such that the fault effects are eliminated and the system stability is achieved. In the literature, several research results on the FTC techniques are documented, see for example [1–9], and the references therein.
In industrial processes, most of systems are described by nonlinear mathematical models. Takagi-Sugeno (TS) fuzzy systems [10] provide a powerful tool to approximate nonlinear characteristics. T-S fuzzy systems are nonlinear models represented by a set of local linear models. By fuzzy blending of linear representations with appropriate membership functions, the overall fuzzy model of the system is achieved, which greatly simplifies the analysis and control for complex nonlinear systems. Therefore, excellent results in FE and FTC problems of T-S fuzzy systems are developed in [11–17]. In [18], a FTC is designed for TS fuzzy systems subject to actuator faults. However, this result must verify the rank condition, which is really hard to fulfill for many practical systems. In [19], the problem of FE and FTC for a T-S fuzzy systems with uncertainties and actuator faults is investigated without the requirement of rank condition. It deals only with constant faults, however, the faults are time-varying in many real systems. In [20], a sliding mode observer (SMO) is designed to estimate sensor fault for nonlinear stochastic systems for FTC. However, the actuator fault is not considered. In [21], a FTC is developed for T-S fuzzy systems affected by actuator faults. Since in many practical systems, actuator and sensor faults may occur at the same time and uncertainties may exist. It is desirable to consider actuator and sensor faults under one unified framework. For example, in [22], a SMO-based FE and FTC is designed for a class of nonlinear systems subject to actuator and sensor faults. A major disadvantage of this approach is the appearance of chattering mode. In [23], FE and FTC problems are studied to simultaneously estimate sensor and actuator faults using two observers and filter. However, this method is more expensive since it requires a high additional computation cost. In [24], a robust adaptive observer is developed to simultaneously estimate state and both sensor and actuator faults for nonlinear systems despite the presence of disturbances. A FTC law is applied to stabilize the closed-loop system and compensate the fault effects. However, sufficient conditions of observer and controller gains are formulated in an unified optimization problem and computed by solving a set of LMIs only in single step. Unfortunately, these results need the knowledge of the upper bounds of faults. If the information of fault is unknown, the SMO cannot be obtained.
The aim of this work is to address fault estimation and fault tolerant control problems for T-S fuzzy systems subject to simultaneously actuator faults, sensor faults and uncertainties. First, a novel robust adaptive SMO is proposed to estimate the states and both actuator and sensor faults using equivalent output error injection approach. Then, based on online fault information a static outputfeedback fault-tolerant control (SOFFTC) is designed to compensate the fault effects and stabilize the closed-loop system. All the design conditions are formulated in an optimization problem under LMIs constraints. Finally, the simulation result of an inverted pendulum with cart system is given to prove the effectiveness of the proposed method.
The main contributions of the present work are the following:
- A novel fuzzy adaptive SMO is designed for the estimation of states and faults in a T-S fuzzy systems affected by simultaneously actuator faults, sensor faults and uncertainties. Robustness against uncertainties is analyzed using the H∞ technique to reduce its effect.
- Most existing SMO design methods such as those reported in [22–24] assume that the value of the upper bounds of actuator faults ρa and sensor faults ρs is known. If the information of fault is unknown or exceeds the admissible value, these methods cannot be feasible. To overcome this problem, a new adaptive law is constructed to estimate the upper bounds online.
- The problem of both actuator and sensor FE under one unified framework for T-S fuzzy systems is investigated. Whereas, many researchers have considered only sensor faults [25–27] or actuator faults [28,29].
- Basedon the FE, a SOFFTC is designed to effectively accommodate the influence of fault and ensure the stability of the resulting closed-loop system. The proposed method is easily be implemented in practice and is much simpler than dynamic output feedback fault tolerant controller.
- Sufficient conditions of the observer and controller are formulated in an optimization problem under LMIs constraints which can be designed separately.
The rest of this paper is organized as follows: Section 2 presents the problem formulation and preliminaries. The design of the observer and the analysis of the stability of the error dynamics are given in Section 3. FE is studied in Section 4. Section 5 gives the SOFFTC scheme. Finally, simulation example in Section 6 validates the efficiency of the proposed algorithm.
2. Problem Formulation and Preliminaries
Consider a TS fuzzy model with actuator faults, sensor faults and uncertainties. The ith rule of the T-S fuzzy model is of the following form:
Plant Rule i: If ξ1(t) is µ1,i and … ξg(t) is µg,i, Then
where x(t) ∈ Rn represents the state vector; u(t) ∈ Rm is the input; y(t) ∈ Rp is the output; yc(t) ∈ Rp1 is the controlled output; Ai, Bi, Mi, Ei, Ci, N and Cci are real known constant matrices with appropriate dimensions; fa(t) : R+ → Rq and fs(t) : R+ → Rh represent additive actuator fault and sensor fault vector, respectively; d(x,u,t) ∈ Rl models the uncertainties, which is assumed to belong to L2 [0, ∞); the pairs (Ai,Ci) are observable, and the pairs (Ai, Bi) are controllable; ξj(j = 1,…,g) are the premise variables, and µj,i(j = 1,…,g;i = 1,…,k) are fuzzy sets; g and k are the number of premise variables and IF-THEN rules, respectively. The fuzzy model is given by:
- θij µj(t) and here θij(.) stands for the order of the membership
function of θij. It is assumed that
where ρa and ρs are unknown positive scalars.
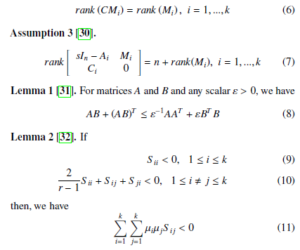
Assumption 2 [30]. The actuator fault distribution matrices Mi in (2) satisfy:
Lemma 3 [33]. Under Assumption 2, there exists coordinate trans where A11,i ∈ Rq×q, A22,i ∈ R(n−q)×(n−q), B1,i ∈ Rq×m, M1,i ∈ Rq×q, E1,i ∈ Rq×l, N2 ∈ R(p−q)×h, C11,i ∈ Rq×q and C22,i ∈ R(p−q)×(p−q) is invertible, i = 1,…,k.
Through coordinate transformations, the system (2) is converted into the following two subsystems:
where S 11,i ∈ R(p−q)×p and S 22,i ∈ Rq×p. The variable z1(t) can be obtained by:
Lemma 4 [33]. The pair (A0,i,C0,i) is observable, if the pair (A22,i,C22,i) is detectable, i = 1,…,k. Then, there exists matrices Li,
h i having the special structure Li = L1,i 0 , such that A22,i+LiC22,i is stable, i = 1,…,k.
Let the transformation of coordinates h(t) = h hT1 (t) hT2 (t) iT = TL,iz0(t) with

Therefore, T-S fuzzy subsystems (12) and (13) can be rewritten respectively as:
For system (19), we construct the following adaptive SMO:
where zˆ1(t), hˆ1(t) and υˆ1(t) denote, respectively, the estimated z1(t), h1(t) and ,i ∈ Rq×q is a stable matrix and ν1,i(t) is defined
![]()
where P1 ∈ Rq×q > 0 is the Lyapunov matrix for A11s ,i, ρˆa is adaptive parameter to estimate the unknown parameter ρa, and the scalar ρˆa is introduced using an update law with constant σ1 > 0.
For system (20), we design the following adaptive SMO:
![]()
where P02 ∈ R(p−q)×(p−q) > 0, ρˆs is adaptive parameter to estimate the unknown parameter ρs, and the scalar ρˆs is introduced using an update law ρ˙ˆs = σ2 N2T P02 (υ3(t) − υˆ3(t)) (24) with constant σ2 > 0.
Let us define e1(t) = z1(t) − zˆ1(t), e2(t) = h1(t) − hˆ1(t) and e3(t) = h2(t) − hˆ2(t), then the error dynamic system as follows:
with H1 ∈ Rq×q, H2 ∈ R(n−q)×(n−q) and H3 ∈ R(p−q)×(p−q). The adaptive SMO design method under H∞ performance to be addressed in this work is
- The observer error dynamics system (25) with d(x,u,t) = 0 is asymptotically stable, namely, there is no uncertainty;
- For a given γ1 > 0. The following H∞ performance is satisfied:
![]()
for all T > 0 and d(x,u,t) ∈ L2 h 0 ∞ under zero initial conditions.
3.1 Stability analysis
Theorem 1. Consider T-S fuzzy system (2) under Assumptions 13. The observer error dynamics system (25) is asymptotically stable and satisfy (28) with attenuation level γ1 > 0, if there exist matrices P1 > 0, P01 > 0, P02 > 0, Xi, Yi, i = 1,…,k, such that:
Minimize γ1 subject to
If the optimization problem is solved, then we can obtain the following observer gains
Proof. Let the following Lyapunov functional candidate:
Using the definition of ν1,i(t) and the bound of fa(t), we have eT1 (t)P1M1,i(fa(t) − ν1,i(t)) + σ 11 ρ˜a(−ρˆ˙a)

When d(x,u,t) = 0, we have
If Λi < 0, then V˙ (t) < 0, which implies that e → 0 as t → ∞.
Therefore, the error dynamics system is asymptotically stable.
When d(x,u,t) , 0, we define

The previous inequalities are nonlinear because of P01Li and P02Ki. This problem can be solved using the variable change Xi = P01Li and Yi = P02Ki. Applying the Schur complement, we can obtain the LMI form (29). So if J1(t) < 0, the error dynamics system (25) is stable satisfying the H∞ performance (28). .
3.2 Sliding motion analysis
For system (25), Let
![]()
Theorem 2. Consider system (2) satisfying Assumptions 13. The system error dynamics (25) can be driven to the sliding surface S in finite time and remain on it if the LMI (29) is solvable and the gains

Then the reachability condition [34] is verified.
4. Fault Estimation
From Theorem 2, an ideal sliding mode take place on S and e˙1(t) = e1(t) = 0. Consequently, the error dynamics of e1(t) becomes:
![]()
where ν1eq(t) denotes the equivalent term [34] replaced by:

where β1 = M1−1A12 maxσmax(H−1) and β2 = M1−1E1 max. Thus for a small γ1β1 + β2, fa(t) can be estimated as:
5. Fault Tolerant Controller Design
Define corrected output as:
where efs(t) = fs(t) − fˆs(t).
A SOFFTC law [35] is designed as follows:
The gain Gi is designed so that BiGi = Mi where B+i is the pseudo inverse of Bi [36]. It follows that
h eTf s(t) eTfa(t) dT(x,u,t) i . The control purpose in this paper for the closed-loop fuzzy system (63) is to design a SOFFTC (60) such that
- The closed-loop fuzzy system (63) with (ϕ(t) = 0) is asymptotically stable .
- For a given scalar γ2 > 0, the following H∞ performance is satisfied:

for all L > 0 and ϕ(t) ∈ L2 [0, ∞) under zero initial conditions.
Theorem 3. The closed-loop system (63) is asymptotically stable and satisfy the H∞ performance index (64), if there exist matrix P¯x > 0, matrices R, S¯ i and scalar > 0, such that:

where

with Υij = (Ai + BiK¯ jCi)T Px + Px(Ai + BiK¯ jCi) + CiTCj. Thus, Jx(t) < 0, if
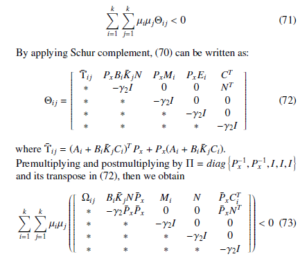
where Υ¯ ij = (Ai + BiK¯ jCi)T Px + Px(Ai + BiK¯ jCi). Premultiplying and postmultiplying by Π = diagnP−x1, P−x1, I, I, Io
Notice that the matrix inequality Ωij < 0 is a Bilinear Matrix Inequalities (BMIs). Denoting CiP¯x = RCi and K¯ jR = S¯ j, so that

with
If (84) is verified, we have Jx(t) < 0, which can guarantee the closed-loop system is asymptotically stable.
6. Simulation Example
In this example, The inverted pendulum with cart system [37] is considered:
where x1(t) and x2(t) are the angular position and velocity, respectively; x3(t) and x4(t) are the cart position and velocity, respectively; m is the pendulum mass, M is the cart mass, g is the gravity constant, and a = 1/(m + M) . The values of the parameters used in this simulation are m = 0.2kg, M = 0.8kg, l = 0.5m, and L = 2m .
Then, we get the TS fuzzy system with the following fuzzy rules:
Rule1: If x1(t) is about 0, Then
( x˙(t) = A1x(t) + B1(u(t) + fa(t)) + E1d(t) y(t) = C1x(t) + N fs(t)
Rule1: If x1(t) is about ± , Then
we set d(x,u,t) = − fc + m l x22 (t) sin(x1 (t)) where fc = ρ sign(x4 (t)) with ρ = 0.05 . The membership functions for rules 1 and 2 are chosen based on the method of sector nonlinearity [38] as follows:
By Choosing H1 = 1, H2 = I3 and H3 = I2, we can solve the optimization problem of Theorem 1 using Matlab LMI Toolbox and we obtain γ1 = 0.3614, A11s ,1 = −3.2457, A11s ,2 = −3.2457,
Solving the optimization problem in Theorem 3 results the following controller gain matrices for a minimum attenuation level γ2 = 1.6128:
K¯1 = h −2.7838 −6.8067 −11.1030 i
K¯2 = h −2.1520 −7.5055 −11.8265 i
We simulate the closed-loop system be choosing σ1 = 10, σ2 = 15, δ1 = 0.01, δ2 = 0.02, la,1 = la,2 = 10 and ls,1 = ls,2 = 12, initial conditions x10 = π/20, x20 = 0, x30 = 2 and x40 = 0. fa(t) and fs(t) are assumed that, respectively
The simulation results of this example are given in Figures 1-5. Figures 1 and 2 show that the proposed adaptive SMO can estimate the actuator and sensor faults simultaneously despite the presence of uncertainties.
Actuator fault estimation
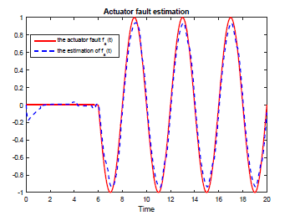
Figure 1: The actuator fault fa(t) and its estimation.
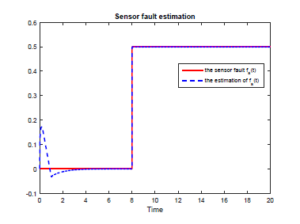
Figure 2: The sensor fault fs(t) and its estimation.
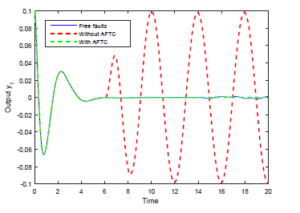
Figure 3: Output y1(t) under the static output feedback FTC.
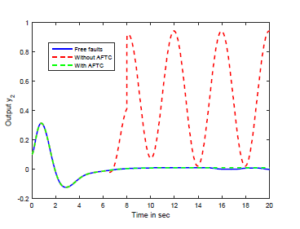
Figure 4: Output y2(t) under the static output feedback FTC.
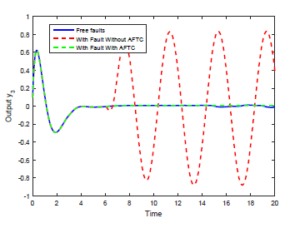
Figure 5: Output y3(t) under the static output feedback FTC.
Simulation results for the systems outputs response are illustrated in Figures 3-5. It is clear to see that the outputs without SOFFTC do not converge to the outputs of the fault-free model (i.e. without any fault). However, the outputs’s trajectories of the system 7 with SOFFTC reach the outputs of nominal model.
Conclusion
In this paper, we have considered the problems of FE and FTC for T-S fuzzy systems with uncertainties, actuator and sensor faults, simultaneously. Using the H∞ optimization technique, an adaptive fuzzy sliding mode observer has been firstly designed to estimate the system state, actuator and sensor faults, simultaneously. Secondly, using the information of online fault estimates, a novel SOFFTC has been developed to compensate the faults and stabilize the closedloop system. Thus, sufficient condition for the existence of the proposed ASMO and SOFFTC has been formulated in terms of LMIs. Finally, a simulation example was used to show the effectiveness of the proposed methods.
- S. Ding, “Integrated design of feedback controllers and fault detectors” Annual Reviews in Control, 33(3), 124–135, 2009. https://doi.org/10.1016/j.arcontrol.2009.08.003
- R. Isermann, Fault-Diagnosis Applications : Model-Based Bondition Mon- itoring : Actuators, Drives, Machinery, Plants, Sensors, and Fault- Tolerant Systems, Springer Science and Business Media, 2011.
- H. Alwi, C. Edwards, C. Tan, Fault Detection and Fault-Tolerant Control Using Sliding Modes, Springer Science and Business Media, 2011.
- S. Dhahri, A. Sellami, F. Ben Hmida, “Robust H∞ sliding mode observer design for fault estimation in a class of uncertain nonlinear systems with LMI opti- mization approach” International Journal of Control, Automation and Systems, 10(5), 1032-1041, 2012. https://doi.org/10.1007/s12555-012-0521-3
- M. S. Shaker, R. J. Patton, “Active fault tolerant control for nonlin- ear systems with simultaneous actuator and sensor faults” International Journal of Control Automation and Systems, 11 (6), 1149–1161, 2013. https://doi.org/10.1007/s12555-013-0227-1
- Z. Gao, C. Cecati, S. Ding, “A survey of fault diagnosis and fault tolerant techniques-part i : fault diagnosis with model-based and signal-based ap- proaches” IEEE Transactions on Industrial Electronics, 62 (6), 3757-3767, 2015. https://doi.org/10.1109/TIE.2015.2417501
- J. Wang, “H fault-tolerant controller design for networked control systems with time-varying actuator faults” International Journal of Innovative Comput- ing, Information and control, 11(4), 1471-1481, 2015.
- H. Azmi, M. J. Khosrowjerdi, “Robust adaptive fault tolerant control for a class of lipschitz nonlinear systems with actuator failure and distur- bances” Journal of Systems and Control Engineering, 230(1), 13-22, 2015. https://doi.org/10.1177/0959651815606628
- Y. Tian, F. Zhu, “Fault estimation and observer based fault-tolerant controller in finite frequency domain” Transactions of the Institute of Measurement and Control, 40(5), 1659–1668, 2017. https://doi.org/10.1177/0142331216688617
- T. Takagi, M. Sugeno, “Fuzzy identification of systems and its applications to modeling and control” IEEE Transactions on Systems, Man and Cybernetics, 15(1), 116-132, 1985. https://doi.org/10.1109/TSMC.1985.6313399
- K. Zhang, B. Jiang, P. Shi, “Fault estimation observer design for discrete time TakagiSugeno fuzzy systems based on piecewise Lya- punov functions” IEEE Trans. Fuzzy Syst, 20(1), 192200, 2012. https://doi.org/10.1109/TFUZZ.2011.2168961
- Q. Jia, W. Chen, Y. Jin, Y. Zhang, H. Li, “A New Strategy for Fault Estimation in TakagiSugeno Fuzzy Systems via a Fuzzy Learn- ing Observer” in Proceeding of the 11th World Congress on Intelligent Control and Automation (WCICA), Shenyang, China, 3228-3233, 2014. https://doi.org/10.1109/WCICA.2014.7053248
- C. Sun, F. Wang, X.Q. He, “Robust fault estimation for a class of TS fuzzy singular systems with time-varying delay via improved delay partitioning approach” J. Control Sci. Eng., 2016, 2016. https://doi.org/10.1155/2016 1.
- D. Ding, X. Du, X. Xie, M. Li, “Fault estimation filter design for discretetime TakagiSugeno fuzzy systems” IET Control Theory Appl., 10(18), 2456-2465, 2016. https://doi.org/10.1049/iet-cta.2016.0318
- F. You, S. Cheng, K. Tian, X. Zhang, “Robust fault estimation based on learning observer for TakagiSugeno fuzzy systems with interval timevary- ing delay” Int. J. Adapt. Control Signal Process., 34(1), 92–109, 2020. https://doi.org/10.1002/acs.3070
- S. Liu, X. Li, H. Wang, J. Yan, “Adaptive fault estimation for T-S fuzzy systems with unmeasurable premise variables” Advances in Difference Equations 2018, 105(2018), 2018. https://doi.org/10.1186/s13662-018-1571-5
- Z. Gao, X. Shi, S.X. Ding, “Fuzzy state/disturbance observer de- sign for TS fuzzy systems with application to sensor fault esti- mation” IEEE Transactions on Cybernetics, 38(3), 875–880, 2018. https://doi.org/10.1109/TSMCB.2008.917185
- Q. K. Shen, B. Jiang, V. Cocquempot, “Fault tolerant control for TS fuzzy systems with application to nearspace hypersonic vehicle with actuator faults” IEEE Trans. Fuzzy Syst., 20(4), 652665, 2012. https://doi.org/10.1109/TFUZZ.2011.2181181
- X. H. Li, F. L. Zhu, A. Chakrabarty, “Nonfragile fault tolerant fuzzy observer- based controller design for nonlinear systems” IEEE Trans. Fuzzy Syst., 24(6), 16791689, 2016. https://doi.org/10.1109/TFUZZ.2016.2540070
- M. Liu, X. B Cao, and P. Shi, “Fault Estimation and Tolerant Control Fuzzy Stochastic Systems” IEEE Trans. Fuzzy Syst., 21(2), 221229, 2013.
- A. Navarbaf, M. J. Khosrowjerdi, “Fault-tolerant controller design with fault estimation capability for a class of nonlinear systems using generalized Takagi- Sugeno fuzzy model” Transactions of the Institute of Measurement and Control, 41(15), 42184229, 2019. https://doi.org/10.1177/0142331219853687
- M. Liu, X. Cao, P. Shi, “Fuzzy-model-based fault-tolerant design for nonlinear stochastic systems against simultaneous sensor and actuator faults” IEEE Trans. Fuzzy Syst., 21(5), 789799, 2013. https://doi.org/10.1109/TFUZZ.2012.2224872
- M. Sami, R. J. Patton, “Active fault tolerant control for nonlinear systems with simultaneous actuator and sensor faults” Int. J. Control Autom. Syst., 11(6), 11491161, 2013. https://doi.org/10.1007/s12555-013-0227-1
- S. Makni, M. Bouattour, A.E. Hajjaji, M. Chaabane, “Robust fault toler- ant control based on adaptive observer for Takagi-Sugeno fuzzy systems with sensor and actuator faults: Application to single-link manipulator” Transactions of the Institute of Measurement and Control, 2020, 2020. doi.org/10.1177/0142331220909996.
- P. Aboutalebi, A. Abbaspour, P. Forouzannezhad, A. Sargolzaei, “A novel sensor fault detection in an unmanned quadrotor based on adaptive neural observer” Journal of Intelligent and Robotic Systems, 90, 473484, 2018. https://doi.org/10.1007/s10846-017-0690-7
- H. Li, Y. Gao, P. Shi, H. K. Lam, “Observer-based fault detection for nonlinear systems with sensor fault and limited communication capac- ity” IEEE Transactions on Automatic Control, 61(9), 27452751, 2016. https://doi.org/10.1109/TAC.2015.2503566
- A. Valibeygi, A. Toudeshki, K. Vijayaraghavan, “ Observer based sensor fault estimation in nonlinear systems” Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 230(8), 759777, 2016. https://doi.org/10.1177/0959651816654070
- M. Buciakowski, M. Witczak M, V. Puig, et al., “A bounded-error ap- proach to simultaneous state and actuator fault estimation for a class of nonlinear systems” Journal of Process Control, 52, 1425, 2017. https://doi.org/10.1016/j.jprocont.2017.01.002
- M. Bataghva, M. Hashemi, “Adaptive sliding mode synchronisation for fractional-order non-linear systems in the presence of time-varying actuator faults” IET Control Theory Appl., 12(3), 37783, 2018. https://doi.org/10.1049/iet-cta.2017.0458
- H. Schulte, E. Gauterin, “Fault-tolerant control of wind turbines with hydrostatic transmission using TakagiSugeno and sliding mode techniques” Annual Reviews in Control, 40, 8292, 2015. https://doi.org/10.1016/j.arcontrol.2015.08.003
- H. Moodi, M. Farrokhi, “On observer-based controller design for sugeno sys- tems with unmeasurable premise variables” ISA Transactions, 53(2), 305316, 2014. https://doi.org/10.1016/j.isatra.2013.12.004
- T. Dang, W. Wang, L. Luoh, C. Sun, “Adaptive observer design for the uncer- tain takagisugeno fuzzy system with output disturbance” IET Control Theory Applications, 6(10), 13511366, 2011. https://doi.org/10.1049/iet-cta.2011.0022
- M. Corless, J. Tu, “State and input estimation for a class of uncertain systems” Automatica, 34(6), 757764, 1998. https://doi.org/10.1016/S0005- 1098(98)00013-2
- V.I. Utkin, Sliding modes in control optimization, Springer, Berlin, 1992.
- K. Tanaka, H. Wang, Fuzzy control systems design and analysis: a linear matrix inequality approach, Wiley, New York, USA, 2001.
- Z. Gao, P. J. Antsaklis, “Stability of the pseudo inverse method for reconfigurable control systems” Int. J. of Control, 53, 717–729, 1991. https://doi.org/10.1080/00207179108953643
- K. Ogata, Modern control engineering, 3rd ed. Englewood Cliffs, NJ: Prentice- Hall, 1997.
- M. C. M. Teixeira, S. H. Zak, “Stabilizing controller design for uncertain nonlinear systems using fuzzy models” IEEE Transaction on Fuzzy Systems, 7(2), 133–142, 1999. https://doi.org/10.1109