MIMO Fractional Order Control of a Water Tank Plant

Adv. Sci. Technol. Eng. Syst. J. 4(6), 321–327 (2019);
 DOI: 10.25046/aj040641
DOI: 10.25046/aj040641
This work implements a MIMO (Multiple Input Multiple Output) FO (Fractional Order) control system for controlling the level and temperature of the water inside a tank by means of two inflow rates: cold and hot water, which are mixed to produce an outflow rate. Such a process exhibits coupling between inputs and outputs. A linear model of the plant is obtained experimentally. Such a model, the transfer matrix function of the plant, is used to design a centralized MIMO IO (Integer Order) controller that permits to achieve complete decoupling between the set points of level and temperature and the corresponding controlled outputs: level and temperature in the tank. The MIMO FO controller is obtained making fractional all de transfer functions of the MIMO IO controller. Experimental results demonstrate that the MIMO FO control system improves the control performance of the plant outputs: level and temperature of the water in the tank.
1. Introduction
In the literature, few studies have been performed for mod- elling a MIMO tank water plant having interaction (coupling) between its inputs: cold and hot water flow rates, and its outputs: level and temperature of the water into the tank. For instance, in [1], the level and temperature inside the tank are controlled by means of cold and hot water flow rates using two control configurations. The first configuration, called coupled control, employs two PID controllers, while the sec- ond, called decoupled control, uses two PID controllers and two decoupler devices. Figure 1 shows the controlled level and temperature using a coupled control configuration.
In [2], a water tank plant is modelled and controlled using two PID (Proportional Integral Derivative) controllers. The work in [3] employs a decoupled model of the water tank plant, which is controlled by means of two PID controllers and four decoupling devices, while in the work published in [4], the water tank plant is controlled by a MIMO PID controller using as control inputs the cold water flow rate and the electric current supplied to a heating resistance. The simulation work in [5] employs a fuzzy logic controller to control the temperature and water Level in a boiler. At the present, no work that employs a MIMO fractional order controller has been published.
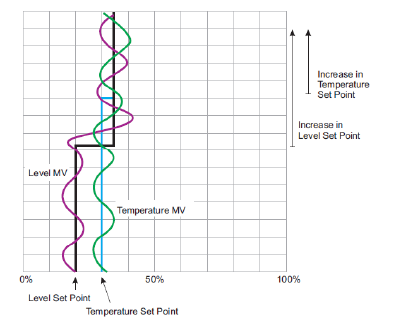 Figure 1: Controlled level and temperature using a decoupled control config- uration. MV stands for Manipulated Variable. Taken from [1].
Figure 1: Controlled level and temperature using a decoupled control config- uration. MV stands for Manipulated Variable. Taken from [1].
This work is organized as follows. Section 2 describes the multipurpose plant and the supervision module used in this work to implement the MIMO feedback control systems. Section 3 deals with the experimental modelling of the water tank plant. The design and implementation of a MIMO IO as well as a MIMO FO control systems are the topics of Sections
2. Plant Description
Figure 2 shows the multipurpose plant, patented by UTEC (Universidad de Ingenieria y Tecnologia) [6] used in this work, while Figure 3 depicts the corresponding supervision module patented by UTEC [7]. Such equipment is located in the Process Automation Lab of UTEC.
 Figure 2: The multipurpose plant
Figure 2: The multipurpose plant
 Figure 3: The supervision module
Figure 3: The supervision module
Figure 4 depicts the P&ID (Piping and Instrument Diagram) of the multipurpose plant. In Figure 4, T–10 is the water tank plant. Observe that a flow rate qC of cold water and a flow rate qH of hot water are entering into T–10. A warm water flow rate qD is exiting from T–10. Such a tank possesses a water overflow pipe not shown in Figure 4. The on–off valve DV–10 allows the passage of qC. The control valve FV–10 is used to regulate qC, while the flow transmitter FT–10 measures qC.
The hot water flow rate of qH is regulated by the control valve FV–11 and measured by the flow transmitter FT–11. Inside the tank T–10 there is a temperature transmitter TT–10 and a pressure transmitter PT–10, which is used as a level transmitter. In the tank T–10, there exists an electric heating resistance, whose electric current is controlled by the power controller PW–10 located in the supervision module. Both devices are not used in this paper. This work employs the tank T–20 to produce the required hot water flow rate qH at a temperature of 50◦C. The water flow rate qD exits T–10 through the on–off valve DV–30.
Observe in Figure 4, that the on–off valve DV–20 permits the entering of the flow rate qC to the tank T–20. This tank possesses a low level swith (LL–20) and a high level switch (HL–20) to indicate if the tank is either empty or filled with water, respectively. The water into the tank T–20 is heated electrically. The temperature into this tank is measured by the temperature transmitter TT–20 and controlled by means of the power controller PW–20 located in the supervision module. A flow rate qH with a temperature of about 50◦C is pumped to the tank T–10 by using the pump P–20. The pressure into the pipe that connects tanks T–10 and T–20 is measured by the pressure transmitter PT–20. The speed of the pump is kept constant by means of a speed controller (a variable frequency drive) located in the supervision module.
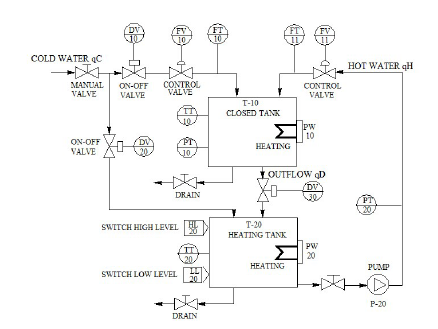 Figure 4: P&ID of of the multipurpose plant
Figure 4: P&ID of of the multipurpose plant
Figure 3 shows the supervision module that is equipped with breakers, power sources, a PanelView front, two powerful PAC (Programmable Automation Controller), a PLC (Programmable Logic Controller), and a Flex I/O (Input/Output) switch among others. The latter device permits Ethernet communication between the PACs and the PLC of the supervision module with the valves and transmitters of the multipurpose plant. For such a purpose, input and output connectors available on the front panel of the supervisory module (Figure 3) permit to wire the PACs an PLC with the field instrumentation.
The software Studio 5000 from Rockwell Automation is used to elaborate the HMI (Human Machine Interface) and to implement the control algorithms written in structured text language. This work employs the ControlLogic 5000 PAC. Table 1 shows the valued parameters and variables used in this paper.
Table 1: Parameters and variables employed in this work
| Symbol | Description | Value |
| A | Tank rectangular section | 0.12 m2 |
| Ao | Output pipe section | 5.06×10−4 m2 |
| h¯ = y¯1 | Steady state of h | 0.2 m |
| q¯C = u¯1 | Steady state of qC | 6.66×10−5 m3/s |
| q¯H = u¯2 | Steady state of qH | 7.66×10−5 m3/s |
| q¯D | Steady state of qD | 12×10−5 m3/s |
| g | Earth’s gravity | 9.81 m/s2 |
| θC | Temperature of qC | 289 K |
| θH | Temperature of qH | 321 K |
| θ¯ = y¯2 | Steady state of θ | 304 K |
| ρC | Water density in qC | 998 kg/m3 |
| ρH | Water density in qH | 988 kg/m3 |
| ρD | Water density in qD | 995 kg/m3 |
| Cp | Heat specific capacity | 4186.8 J/(kg–K) |
| Cd | Discharge coefficient | 0.16 |
| α | Discharge factor | 3.586 m2.5/s |
The outflow rate qD shown in Table 1 can be computed from
![]() In (1), Cd is the dimensionless discharge coefficient, g is the gravitational acceleration, and Dd is the diameter of the pipe for the outflow qD. Knowing the steady state values h¯ and q¯D of h and qD, respectively,Cd and α can be calculated from
In (1), Cd is the dimensionless discharge coefficient, g is the gravitational acceleration, and Dd is the diameter of the pipe for the outflow qD. Knowing the steady state values h¯ and q¯D of h and qD, respectively,Cd and α can be calculated from
 Three experiments are performed to determine the discharge coefficient Cd shown in Table 1. For each experiment, the valve FV–10 is opened in a certain percentage to allow the flow rate qC enter the tank T–10. At the same time, the flow rate qD is regulated by means of the manual valve until the level h into the tank remains unchanged. At that point, the output flow rate of magnitude q¯D equals the input flow rate of magnitude q¯C. Then, the discharge coefficient Cd can be computed from (2). Table 2 shows the results of the experiments. The selected value for Cd is 0.16.
Three experiments are performed to determine the discharge coefficient Cd shown in Table 1. For each experiment, the valve FV–10 is opened in a certain percentage to allow the flow rate qC enter the tank T–10. At the same time, the flow rate qD is regulated by means of the manual valve until the level h into the tank remains unchanged. At that point, the output flow rate of magnitude q¯D equals the input flow rate of magnitude q¯C. Then, the discharge coefficient Cd can be computed from (2). Table 2 shows the results of the experiments. The selected value for Cd is 0.16.
Table 2: Experiment results to obtain Cd
| q¯C (m3/s) | h¯ (m) | Cd | α (m2.5/s ) |
| 1.45× 10−4 | 0.162 | 0.160 | 3.586 |
| 1.95× 10−4 | 0.307 | 0.157 | 3.518 |
| 9.72× 10−5 | 0.092 | 0.142 | 3.182 |
3. Experimental Plant Modelling
Figure 5 depicts the block diagram of the MIMO LTI (Linear Time Invariant) control system, where s is the Laplace operator, Gp(s), Gc(s), G(s), and GT (s) are transfer matrix functions of the plant, the controller, the open–loop system, and the closed–loop system, respectively. Also, r, e, u, and y are the reference, system error, control, and output vectors, respectively.
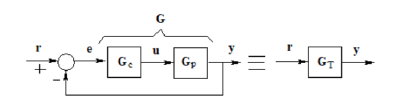 Figure 5: Block diagram of the MIMO feedback control system.
Figure 5: Block diagram of the MIMO feedback control system.
From Figure 5: y(s) = Gp(s)u(s), which can be expressed as
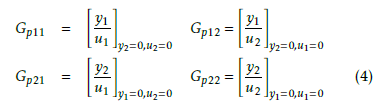
 The four transfer functions of (3) can be obtained experimentally from
The four transfer functions of (3) can be obtained experimentally from
 In the figures shown hereinafter, the water level and temperature in the tank are expressed in cm and oC, respectively. Let us consider a level transmitter span from 0 cm (0% of the span) to 40 cm (100% of the span). To determine Gp11, the valve FV–10 (Figure 4), which regulates the flow rate of cold water u1, is opened from 30 to 50%, making y1 (the water level into the T–10 tank) to change from 10 cm (25% of the span) to 19.5 cm (48.75% of the span) as seen in Figure 6. Using the tangent method in Figure 6, the transfer function Gp11 with gain Kp11 and time constant Tp11 is found to be
In the figures shown hereinafter, the water level and temperature in the tank are expressed in cm and oC, respectively. Let us consider a level transmitter span from 0 cm (0% of the span) to 40 cm (100% of the span). To determine Gp11, the valve FV–10 (Figure 4), which regulates the flow rate of cold water u1, is opened from 30 to 50%, making y1 (the water level into the T–10 tank) to change from 10 cm (25% of the span) to 19.5 cm (48.75% of the span) as seen in Figure 6. Using the tangent method in Figure 6, the transfer function Gp11 with gain Kp11 and time constant Tp11 is found to be
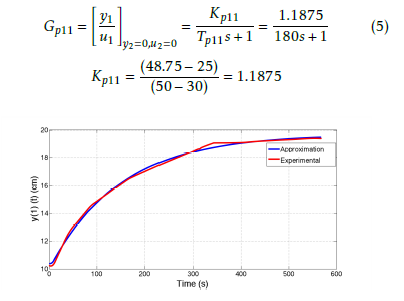 Figure 6: Experimental reaction curve for the Gp11 transfer function.
Figure 6: Experimental reaction curve for the Gp11 transfer function.
To compute Gp12, the valve FV–11 (Figure 4), which regulates the flow rate of hot water u2, is opened from 40 to 60%, making y1 to vary from 10 cm (25% of the span) to 19.5 cm (48.75% of the span) as seen in Figure 7. Using the tangent method in Figure 7, the transfer function Gp12 with gain Kp12 and time constant Tp12 is computed as
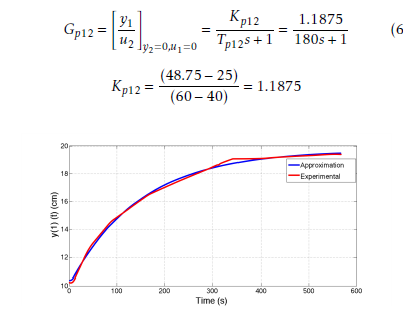 Figure 7: Experimental reaction curve for the Gp12 transfer function.
Figure 7: Experimental reaction curve for the Gp12 transfer function.
Now, let us consider a temperature transmitter span from
16 oC (0% of the span) to 50 oC (100% of the span). To find Gp21, the valve FV–10, which regulates the flow rate of cold water u1 is opened from 30 to 50%, making to drop the temperature y2 from 32 oC (47% of the temperature span) to 24 oC (23.5%) as seen in Figure 8. From such a reaction curve, the transfer function Gp21 with gain Kp21 and time constant Tp21 is calculated as
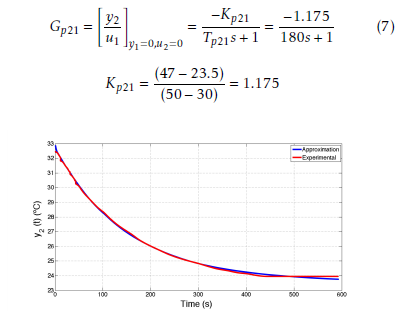 Figure 8: Experimental reaction curve for the Gp21 transfer function.
Figure 8: Experimental reaction curve for the Gp21 transfer function.
To find Gp22, the valve FV–11 is opened from 40 to 60%, making to change y2 from 33 oC (50% of the span) to 43 (79.4% of the span) as seen in Figure 9. From such a figure, the transfer function Gp22 with gain Kp22 and time constant Tp22 is found to be
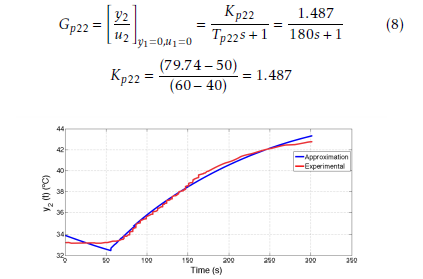 Figure 9: Experimental reaction curve for thr Gp22 transfer function.
Figure 9: Experimental reaction curve for thr Gp22 transfer function.
4. Design of the the Multivariable IO Control System
Consider the following diagonal closed–loop transfer matrix function to assure complete decoupling between the different p inputs.
 For instance, the following GT (s) transfer matrix meets the condition given by (15)
For instance, the following GT (s) transfer matrix meets the condition given by (15)
 Figure 10 depicts the simulation result of the MIMO IO control system using a sampling time of 0.1 s. Reference level and temperature signals were set to 20 cm and 33 oC.
Figure 10 depicts the simulation result of the MIMO IO control system using a sampling time of 0.1 s. Reference level and temperature signals were set to 20 cm and 33 oC.
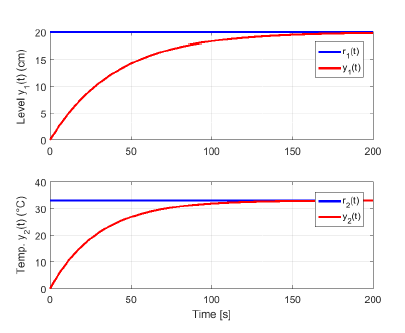 Figure 10: Simulated time–responses of the MIMO IO control system. Top graph: controlled level y1(t). Lower graph: controlled temperature y2(t).
Figure 10: Simulated time–responses of the MIMO IO control system. Top graph: controlled level y1(t). Lower graph: controlled temperature y2(t).
Figure 11 depicts the experimental results of the MIMO IO control system employing most of the parameters obtained in the simulation phase. Some parameters required a real– time post–tuning to achieve the desired responses. Observe in Figure 11 that the controlled level y1(t) possesses a settling time of 225 s, null P.O. (Percent Overshoot), and about a null steady–state error. On the other hand, the controlled temperature y2(t) shows a settling time of 200 s, a P.O. of 25%, and around a null steady–state error.
It is worth to mention that the MIMO IO controller given by (19) constitutes the structure of the MIMO FO controller to be designed in the next Section.
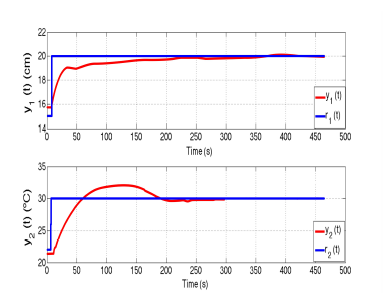 Figure 11: Experimental time–responses of the MIMO IO control system. Top graph: controlled level y1(t). Lower graph: controlled temperature y2(t).
Figure 11: Experimental time–responses of the MIMO IO control system. Top graph: controlled level y1(t). Lower graph: controlled temperature y2(t).
5. Design of the MIMO FO Control System
The approach used in this section was employed in [9] to control two robot manipulators. The MIMO FO controllers is obtained making fractional the MIMO IO controller given by (19). That is, replacing in (19) all Laplace operators s by sδ and sλ, where δ and λ are fractional numbers between 0 and
The FO differentiators sδ and sλ given in (20) may be approximated by polynomials that depend on the Laplace operator s employing various formulas. For example, for the frequency range of operation [ωb,ωh], sδ and sλ can be approximated by the following modified Oustaloup filter described in [10]
 According to [10], the Oustalup filter produces a good approximation for b = 10 and d = 9. The frequency range of operation can be obtained from the Bode diagrams of transfer functions of the robot manipulator’s transfer matrix function. However, such an approximation is not employed in this work because we will perform real–time implementation of recursive codes in the discrete–time domain.
According to [10], the Oustalup filter produces a good approximation for b = 10 and d = 9. The frequency range of operation can be obtained from the Bode diagrams of transfer functions of the robot manipulator’s transfer matrix function. However, such an approximation is not employed in this work because we will perform real–time implementation of recursive codes in the discrete–time domain.
There are various approximations for the FO differentiators sδ and sλ as a function of the shift operator z. This work employs the Muir’s recursion method [11], which establishes
 Using (20), we formulate u = GcFOe. Hence, the control laws u1 and u2 are formulated as
Using (20), we formulate u = GcFOe. Hence, the control laws u1 and u2 are formulated as
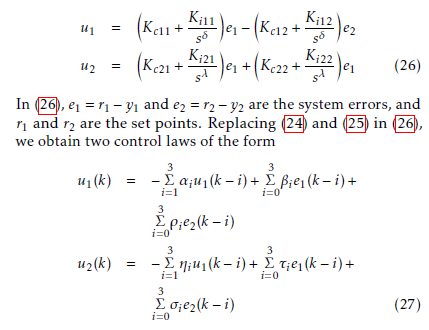 In (27), k is the discrete time. Note that parameters αi, βi, and ρi depend on δ, while parameters ηi, τi, and σi depend on λ. Recall that fractional numbers δ and λ depend on the sampling time T .
In (27), k is the discrete time. Note that parameters αi, βi, and ρi depend on δ, while parameters ηi, τi, and σi depend on λ. Recall that fractional numbers δ and λ depend on the sampling time T .
Figure 12 depicts the simulation result of the MIMO FO control system obtained with the following parameters: T11 = 30, T22 = 40, Kc11 = 1.012, Ki11 = 0.005, Kc12 = − 2.334, Ki12 = − 0.013, Kc21 = 0.0846, Ki21 = 0.007, Kc22 = 2.334, Ki22 = 0.013. Reference level and temperature signals were set to 20 cm and 33 oC. The simulation phase employed a sampling time of 0.1 s.
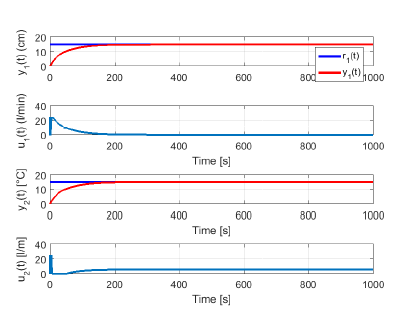 Figure 12: Simulation time–responses of the MIMO FO control system. Top graph: controlled level y1(t), second graph from the top: control force u1(t), third graph from the top: controlled temperature y2(t). Bottom graph: control force u2(t).
Figure 12: Simulation time–responses of the MIMO FO control system. Top graph: controlled level y1(t), second graph from the top: control force u1(t), third graph from the top: controlled temperature y2(t). Bottom graph: control force u2(t).
Figure 13 illustrates the experimental results of the MIMO FO control system using most of the parameters employed in the simulation phase. Some parameters needed a post-tuning to achieve the desired responses. Note in Figure 13 that the controlled level depicts a settling time of 70 s, null P.O., and null steady–state error. Also, the controlled temperature possesses a settling time of 125 s, null P.O., and null steady–state error.
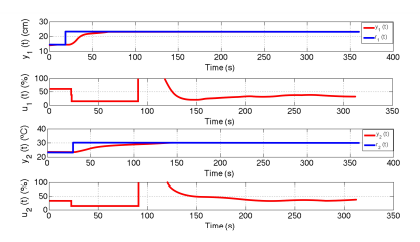 Figure 13: Experimental time–responses of the MIMO FO control system. Top graph: controlled level y1(t), second graph from the top: control force u1(t), third graph from the top: controlled temperature y2(t). Bottom graph: control force u2(t).
Figure 13: Experimental time–responses of the MIMO FO control system. Top graph: controlled level y1(t), second graph from the top: control force u1(t), third graph from the top: controlled temperature y2(t). Bottom graph: control force u2(t).
6. Concluding Remarks
A MIMO IO as well as a MIMO FO control systems were implemented for comparison purposes in this work. At the present, no work that employs a MIMO fractional order controller has been published.
Experimental results demonstrate that the MIMO FO control system performs better because the settling time of the controlled level decreases from 225 s (Figure 11, top graph) to 70 s (Figure 13, top graph), while the settling time of the controlled temperature diminish from 200 s (Figure 11, lower graph) to 130 s (Figure 13, lower graph).
No P.O. (Percent Overshoot) shows the controlled level and temperature using a MIMO FO controller as seen in Figure 13. However, the controlled temperature using a MIMO IO controller depicts a P.O. of 20% as illustrated in the lower graph of Figure 11.
The main problem faced with the employed water tank plant was the supply of hot water in sufficient quantity to perform the experiments.
The simulation of the MIMO IO control systems is necessary to analyse the behaviour of the controlled plant and estimate the tuning parameters required for real–time implementation.
As seen in Figures 11 and 13, the controlled level and temperature do not present oscillations. However, using the decoupled control configuration developed in [1], the controlled level and temperature depicted in Figure 1 show strong oscillations.
Conflict of Interest
The authors declare no conflict of interest.
Acknowledgment
We are very grateful to the Electronic Engineering Department of the Universidad de Ingenieria y Tecnologia (UTEC) for supporting this research work.
- TE37 Equipement Control and Instrumentation Study Station, User Guide, Tecquipment Ltd, UK, 2009.
- V. Tzouanas, “Temperature and Level Control of a Multivariable Wa- ter Tank Process”, in 120th ASEE Annual Conference & Exposition, Atlanta, Georgia, Jun 23–26, 2013, pp. 1–11.
- E. Cornieles, et al., “Modelling and Simulation of a Multivariable Pro- cess Control”, in IEEE ISIE, Montreal, Quebec, Canada, July 9–12, 2006, pp. 1–11. DOI: 10.1109/ISIE.2006.296039
- A Rojas–Moreno and A. Parra–Quispe, “Design and Implementation of a Water Tank Control System using a Multivariable PID Controller”, in 6th International Conference on Computing, Communications and Con- trol Technologies (CCCT), Orlando, USA, June 2008. ISBN: 1934272442 9781934272442, Number OCLC: 552110236
- C. Dinakaran, “Temperature and Water Level Control in Boiler by us- ing Fuzzy Logic Controller”, International Journal of Electrical Power System and Technology, Vol. 1: Issue 1, pp. 27–37, 2015
- A. Rojas–Moreno, et al.,“Planta industrial multipropo´sito para control e instrumentacio´n.” Resolution N° 001545–2019/DIN-INDECOPI, May 20, 2019, Lima, Peru
- A. Rojas–Moreno, et al., “Planta industrial multipropo´sito para control y supervisio´n.” Resolution N° 001035–2019/DIN-INDECOPI, March 28, 2019, Lima, Peru.
- A. Rojas–Moreno and J. Hernandez–Garagatti, “Modelling of a Multipurpose Water Tank Plant”, in IEEE XXIV International Conference on Electronics, Electrical Engineering and Comput- ing (INTERCON), Cusco, Peru, Aug. 15–18, 2017, pp. 1–4. https://doi.org/10.1109/intercon.2017.8079668
- A. Rojas–Moreno, “An Approach to Design MIMO FO Con- trollers for Unstable Nonlinear Plants,” IEEE/CAA Journal of Automatica Sinica, vol. 3, no. 3, July 2016, pp. 338–344. https://doi.org/10.1109/jas.2016.7508810
- C. A. Monje et al., “Implementation of Fractional Order Controllers,” in Fractional–Order Systems and Control. Fundamentals and Applica- tions, Springer–Verlag London Limited 2010, pp. 195–196.
- B. Vinagre, et al., “Two direct Tustin discretization methods for fractional-order differentiator/integrator,”
J. of the Franklin Institute, 340, pp. 349–362, 2003.1016/j.jfranklin.2003.08.001