Spectrum Requirements for Control and Non-payload Communication of Maritime Autonomous Surface Ship

Adv. Sci. Technol. Eng. Syst. J. 4(5), 294–299 (2019);
 DOI: 10.25046/aj040537
DOI: 10.25046/aj040537
This paper proposed a frequency bandwidth required for the Control and Non-Payload Communications (CNPC) in autonomous operations of the Maritime Autonomous Surface Ship (MASS). The issue was to seek a radio spectrum to meet future demand for safe operations of autonomous ship at sea. As described in Document 5B/841 of ITU-R SG, safe navigation of autonomous ships relies on communications for command and control. Based on the operations required for the safe navigation of the MASS, the total bit rates were calculated. The spectrum requirements were obtained for command and control communications in operating the MASS safely. As a result, in terms of bandwidth, transmit rate, and transmit distance, state of the art satellite communication system was suitable for a safe operation of the MASS.
1. Introduction
Recently the Maritime Autonomous Surface Ship (MASS) has received much attentions from maritime institutions and industries. The Maritime Safety Committee (MSC) of the International Maritime Organization (IMO) agreed in its 99th session that the Committee provides an output on “Regulatory scoping exercise for the use of MASS” with a target completion year of 2020 [1]. In 2015, ITU-R Study Groups Working Party 5B has requested member states to study and provide a basis for considering regulatory, technical and operational conditions, for the Control and Non-Payload Communications (CNPC) link between satellite services, fixed service, mobile service, and the Unmanned Maritime Systems (UMS) in maritime environments [2]. The society of maritime industries on behalf of United Kingdom has released the MASS Code of Practice Version 1.0 which generally describes all the operations of the MASS including communications systems. As described in the 95th session of MSC [3], significant academic research and commercial research and development (R&D) have undertaken on technological aspect of the autonomous navigation and collision avoidance systems. In particular, the Maritime Unmanned Navigation through Intelligence Network (MUNIN) project proposed internal & external communication systems based on state-of-the-art satellite communication systems and communication requirements [4],[5]. In Finland, data requirements for wireless transmission regarding the environmental sensors and remote maintenance as well as remote control needs were identified for connectivity challenges of autonomous ships in different environments, including ports, deep sea, and Arctic regions [6].
However, there are issues as follows: (ⅰ) did not apply a concrete methodology for securing communication channels which are dedicated for safe operation of the MASS via the CNPC; and (ⅱ) only used state-of-the-art satellite communication system based on communication requirements without calculation of spectrum requirements.
Therefore, in this paper, the spectrum requirements among the available maritime frequency band was calculated to secure appropriate communication channel for safe operation of the MASS by analyzing and utilizing the density of ship traffic. Section 2 described methodology for spectrum requirements, and Section 3 calculated the spectrum requirements. Subsequently, applying the calculated spectrum requirements to the available maritime frequency band, it was validated and discussed in section 4. Finally, a summary of the work and the conclusion drew in section 5.
2. Materials and Methods
2.1. Communication Interfaces for CNPC
The possible communication interfaces for the MASS [7] are shown in Figure 1. The communication interfaces is based on analyses provided through ITU-R WP5B document 5B/841 [2]. The MASS Control Station (MCS) is located at either shore-side or may be mother ship which controls the MASS for some case. The MCS transmits signals for control and commands, while the MASS sends the MCS her state and also information acquired from onboard sensors – so-called telemetry information. The Vessel Traffic Services (VTS) also communicates with both the MCS and the MASS. As shown in the Figure 1, the navigation by ship can start from voyage planning [8]. At the stage of execution and monitoring, the ship’s movement is done in the process of situation awareness through detection and/or identification and sequentially collision avoidance as the result of decision-making by mariner. From viewpoint of safe navigation, the Figure 1 represents the communication interfaces for the safe operations of the MASS. Regardless of the conceptual configuration for the communication interfaces, it is not easy to identify all the information, which is required for a safe navigation. International regulations, The International Regulations for Preventing Collisions at Sea (CORLEGs) [9], The International Convention on Standards of Training, Certification and Watchkeeping for Seafarers (STCW) [10], and The International Convention for the Safety of Life at Sea (SOLAS) [11], can be referred to extract the information required for safe navigation by mariner. However, such regulations describe qualitatively the rules for the collision avoidance among ships and the prevention of any maritime accidents. As presented in Table 1, the international regulations illustrate the articles to be referred to identify the information for a safe navigation. Experiences from mariners can represent the information in detail.
 Figure 1: Communication interfaces for safe operations of MASS [7]
Figure 1: Communication interfaces for safe operations of MASS [7]
Table 1: Regulation related to information for safe navigation
Regulations |
CORLEGs |
STCW |
SOLAS |
Articles |
Part B. Steering and sailing rules: Rules 5~19 |
Code A |
Chapter V. Safety of Navigation |
2.2. Bandwidth for CNPC
To determine the bandwidth for the MASS at sea, a proper frequency band should be identified among available maritime frequency bands. In particular, the CNPC link requires internationally agreed frequency band. This preliminary study provides useful information to find out a proper frequency for the MASS. As described in an Industry Code of Practice, the MASS operations will largely depend on communications systems for control and monitoring of the vessel [12]. It is natural that the CNPC link requires stable and seamless communication. The level of the MASS control will influence on the requirements for the CNPC link. In considerations of the importance of the CNPC link, the two frequency bands, i.e., the Very High frequency (VHF) band, the Ultra High frequency (UHF) band, and the satellite band were being discussed. The present study thus considered the Long Term Evolution – Maritime (LTE-M) for calculating the spectrum requirements of the CNPC.
- LTE-M
In South Korea, in order to ensure maritime information sharing and communication via access to internet at sea, SMART-navigation project is conducting [13],[14], and [15]. It aims to establish high speed wireless maritime network that covers 100km from offshore through ocean environment conscious cell planning. To facilitate a seamless data transfer various services, therefore, LTE-M is constructing. It is 700 MHz of the UHF band, around the harbor for a variety of services, depending on the strategy to a minimum 1 Mbps transfer rate communication network with the appropriate volume up to 100 km. It enables the free exchange of multimedia data between ships and ship and shore and free use of internet in port and coastal area. In addition, the frequency band of The Downlink (DL) and the Uplink (UL) have10 MHz, respectively.
2.3. AIS
Automatic Identification System (AIS) [16] is an automatic tracking system that uses transponders on ships and is used by VTS. It can transmit information between ships and between ships and land station within range of 50 nautical miles (NM) via VHF in the 160 MHz band. Ships fitted with AIS transceivers can be tracked by AIS base stations located along coast line. Information contains the ship’s position, course, speed, name, type, destination, and dimension. SOLAS requires AIS to be fitted aboard international voyaging ships with 300 or more gross tonnage (GT), and all passenger ships regardless of size. A total of 42 AIS base station were constructed on the coasts of South Korea. In present study, in order to take into consideration analysis of the ship traffic flow, data was obtained via AIS during period from January 1 to February 24, 2016.
2.4. Coverage cell
As mentioned in section 2.2, LTE-M enables ships to communicate and exchange data within 100 km (i.e., about 50 nm) of coastal waters from the shore. However, LTE-M with high speed rates for maritime communication network is presently constructing. Therefore, density of the MASS per coverage cell was estimated based on the AIS base stations with about 50 nm of detection distance by considering communication distance and domains as shown in Figure 2.
 Figure 2: Comparison of AIS coverage and LTE-M coverage [13],[14], and [15]
Figure 2: Comparison of AIS coverage and LTE-M coverage [13],[14], and [15]
2.5. Methodology for Spectrum requirements of CNPC
It was utilized based on ‘Characteristics of unmanned aircraft system and spectrum requirements to support their safe operation in non-segregated airspace’ [17] due to non-existence of methodology for spectrum requirements of the MASS’s CNPC. In order to calculate spectrum requirements of the CPNC, four step has been composed as presented in Figure 3: (ⅰ) analyzed the information exchange rates per the MASS based on the CNPC; (ⅱ) estimated the density of the MASS in coverage cell (e.g., AIS base stations area) per hour; (ⅲ) calculated the spectrum requirements for each type of coverage cell based on (ⅱ) and the frequency efficiency by LTE-M; and (ⅳ) multiplied the reuse factor for each cell type, then determined a total of the spectrum requirements for the CNPC.
 Figure 3: Methodology for spectrum requirements of the CNPC
Figure 3: Methodology for spectrum requirements of the CNPC
Calculation methodology of the spectrum requirements for the CNPC of the MASS is shown in equation (1).
 Where denotes spectrum requirements, is reuse factor, is data rate per the MASS, is the number of the MASS per cell, is redundancy factor, is utilization factor, is frequency efficiency.
Where denotes spectrum requirements, is reuse factor, is data rate per the MASS, is the number of the MASS per cell, is redundancy factor, is utilization factor, is frequency efficiency.
3. Calculation factor for spectrum requirements of CNPC
3.1. Data rate for CNPC (B)
Based on the communication interfaces, a basic data rates is provided shown in Table 2. To calculate the basic data rates, the information required to ensure a safe navigation has been extracted by taking the international regulations into account as mentioned in section 2.1. The DL data is transmitted from MCS or VTS to the MASS, while the UL data is delivered to the MCS or the VTS from the MASS. From Table 2, each data channel needs at least 769.4 Kbps for the UL, and 78.3 Kbps for the DL.
Table 2: Basic data rates for a safe navigation
Telecommand&Telemetry |
VTS Communications |
Sensing & Collision Avoidance |
||||||||
VoiceRelay |
Data |
AIS |
RADAR |
Target Tracking |
Image, Video |
|||||
DL |
UL |
DL |
UL |
DL |
UL |
DL |
UL |
UL |
UL |
UL |
0.1742 |
0.262 |
64 |
64 |
4.53 |
0.0789 |
9.6 |
4.8 |
100 |
0.296 |
600 |
Total DL(Kbps) |
78.3 |
|||||||||
Total UL(Kbps) |
769.4 |
|||||||||
3.2. Density of the MASS per coverage cell (M)
According to the development trend all over the world, the MASS aimed to launch short autonomous runs in 2020 and completely unmanned ships on the high seas by 2025. However, no one knows how many of the MASS would be navigated at sea. Therefore, this study supposes that the MASS would be operated on behalf of present navigating ships at sea. At this time, considering the traffic flow of navigating ships in sea area of South Korea, the number of the MASS was determined.
Among sea areas of South Korea, the Janganseo sea area including the Incheon sea area (the Incheon port, the Pyeongtaek port, and the Daesan port) was considered for analyzing the density of ship traffic. In particular, Janganseo sea area has a lots of ship traffic due to pilot station, anchorage, and junction of inbound and outbound ships. Figure 4 presents the detection range of the Incheon sea area.
 Figure 4: AIS coverage in the Incheon sea area
Figure 4: AIS coverage in the Incheon sea area
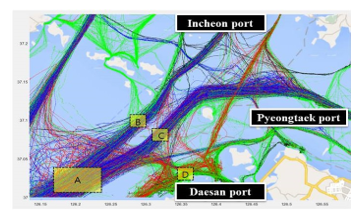 Figure 5: Distribution of ship traffic in the Incheon sea area
Figure 5: Distribution of ship traffic in the Incheon sea area
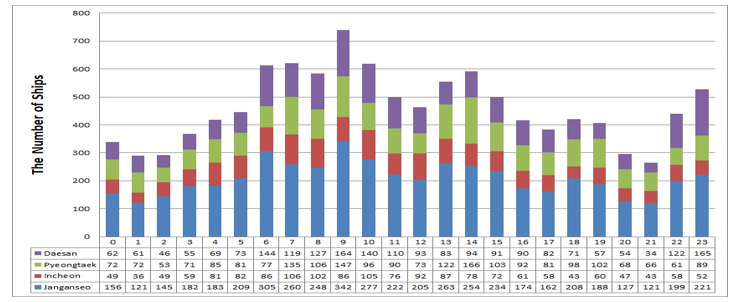 Figure 6: Distribution of ship traffic per hour in the Incheon sea area
Figure 6: Distribution of ship traffic per hour in the Incheon sea area
The number of ships was identified by analyzing the ship traffic statistics by time of day based on traffic density. At this time, it was measured the frequency of ship traffic during the most frequent hours to determine the number of ships per cell. As shown in Figure 5, the Janganseo sea area is distributed as follows: (a) Janganseo sea area; (b) Entrance sea area of Incheon port; (c) Entrance sea area of Pyeongtaek port; and (d) Entrance sea area of Daesan port. Figure 6 shows distribution of ship traffic per hour in the Incheon sea area.
During period from January 1 to February 24, 2016, the highest frequency of ship traffic was at 09:00 hours. The number of ships in the Janganseo sea area (a), the number of entrance sea area of Incheon port (b), the number of entrance sea area of Pyeongtaek port (c), and the number of entrance sea area of Daesan port (d) were 342, 86, 147, and 164, respectively. The Sum of (a), (b), (c), and (d) was 739. And these values were divided by observation period (i.e., from January 1 to February 24) for obtaining the average number of ships in the Incheon sea area. As a result of calculation, 13.4 were measured per hour.
3.3. Redundancy (R) and utilization factor (U)
The Redundancy Factor is information that adds additional information to the original information to ensure accuracy during data transmission. Utilization Factor is the ratio used for each function. Table 3 presents the values of the redundancy factor and utilization factor according to [17].
Table 3: Value of the redundancy and utilization factor
| Factor | Telecommand
& Telemetry |
VTS Communication | Sensing & Collision Avoidance | ||
| Target tracking | RADAR,
AIS |
Video, Image | |||
| R | 2 | 2 | 2 | 1 | 1 |
| U | 0.5 | 1 | 0.5 | 1 | 0.5 |
3.4. Frequency efficiency (E)
As the mobile communication network evolves, the frequency efficiency improves. The frequency efficiency refers to the amount of data bits that can be processed for 1 second at a frequency of 1 Hz in a cell. As the frequency efficiency increases, the frequency capacity increases. In order to calculate the required mobile broadband the spectrum requirement within the next 10 years in South Korea, we analyzed the devices that can use mobile communication network within the present or the next 10 years, and estimated frequency efficiency by year [18]. Table 4 shows the annual frequency efficiency according to the LTE technology. According to [18], the present study measured the spectrum requirements by using the frequency efficiency 1.30 in 2020.
Table 4: Prospect of frequency efficiency for LTE
| LTE | Prospection | ||||
| 2016 | 2017 | 2018 | 2019 | 2020 | |
| 0.97 | 0.97 | 1.08 | 1.19 | 1.30 | |
3.5. Frequency reuse factor (K)
It is a technology used for the allocated frequency to increase the frequency utilization efficiency. In the case of mobile communication, the service area is divided into a plurality of cells, adjacent cells use different frequencies, and non-adjacent cells use the same frequency to increase frequency utilization efficiency. Table 5 shows the frequency reuse factor according to the shape of the cell.
Table 5: Frequency reuse factor according to the shape of the cell
| Cell type | Cell radius (Km) | K applied |
| A | 65 | 7 |
| B | 157 | 4 |
| C | 315 | 3 |
| D | 480 | 3 |
We thus applied the cell radius 65 km of cell type ‘A’ due to taking into consideration AIS coverage and LTE-M coverage as presented in section 2.4.
Table 6: Spectrum requirements for CNPC of the MASS
| Factor | Telecommand
& Telemetry |
VTS communications | Sensing & Collision Avoidance | ||||||||
| Voice Relay | Data | AIS | RADAR | Target Tracking | Image, Video | ||||||
| DL | UL | DL | UL | DL | UL | DL | UL | UL | UL | UL | |
| K | 7 | 7 | 7 | 7 | 7 | 7 | 7 | 7 | 7 | 7 | 7 |
| B (bps) | 174.2 | 262 | 64,000 | 64,000 | 4,530 | 78.9 | 9,600 | 4,800 | 100,000 | 296 | 600,000 |
| M | 13.4 | 13.4 | 13.4 | 13.4 | 13.4 | 13.4 | 13.4 | 13.4 | 13.4 | 13.4 | 13.4 |
| R | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 1 | 2 | 1 |
| U | 0.5 | 0.5 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 0.5 | 0.5 |
| E | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 | 1.3 |
| Hz | 50,276.8 | 75,617.2 | 9,235,692.3 | 9,235,692.3 | 653,713.8 | 11,385.8 | 1,385,353.8 | 692,676.9 | 7,215,384.6 | 85,430.1 | 86,584,615.3 |
Total DL |
11.3 MHz | ||||||||||
| Total UL | 103.9 MHz | ||||||||||
4. Results and Discussion
4.1. Results
Spectrum requirements of the CNPC was measured according to equation (1). As shown in Table 6, total DL, which is transmitted from MCS or VTS to the MASS, was about 11.3 MHz, and total UL, which is delivered to MCS or the VTS from the MASS was about 103.9 MHz. Accordingly, a total of the spectrum requirements of the CNPC was about 115.2 MHz. At this time, the number of the MASS navigated in further was considered as 13.4 according to section 3.2. Therefore, total DL and total UL would be spent on about 0.8 MHz and about 7.8 MHz, respectively, in case of using a single MASS with the transmit rate 0.8 Mbps.
In terms of the three category: (ⅰ) Telecommand and Telemetry; (ⅱ) VTS communications; and (ⅲ) Sensing & Collision avoidance, the amount of the utilization rate out of the total spectrum requirements was observed as presented in Tables 7 and 8. In the utilization rate of the DL, it was indicated that the utilization rate of the VTS communications was higher than other category. On the other hand, in case of the UL, Image and Video were observed as the highest utilization rate. In particular, the total of DL and UL measured from Telecommand and Telemetry was the smallest when comparing of other category.
Table 7: Utilization rate of DL
| Telecommand & Telemetry | DL | 0.44 % | |
| VTS communications | Voice Relay | DL | 81.55 % |
| Data | DL | 5.77 % | |
| Sensing & Collision Avoidance | AIS | DL | 12.24 % |
| Total DL | 100 % | ||
Table 8: Utilization rate of UL
| Telecommand & Telemetry | UL | 0.07 % | |
| VTS communications | Voice Relay | UL | 8.88 % |
| Data | UL | 0.03 % | |
| Sensing & Collision Avoidance | AIS | UL | 0.68 % |
| RADAR | UL | 6.96 % | |
| Target Tracking | UL | 0.08 % | |
| Image, Video | UL | 83.3 % | |
| Total UL | 100 % | ||
4.2. Discussion
In section 4.1, it could be seen that the spectrum requirements of the CNPC and the utilization rate of the UL and the DL were able to be calculated according to [17]. In this section, securing communication channels for a safe operation of the MASS in terrestrial communication system (i.e., VHF band, UHF band) and satellite communication system via the result of the spectrum requirements of the CNPC were discussed, as well as some general reviews of the calculation method.
VHF band (i.e., marine frequency 156 to 174 MHz) is most suitable for short distance communication with the MASS or mutual communication between the MASS and manned ship, but transmission speed is within about 50 Kbps per channel. In case of applying to the calculated spectrum requirements to the VHF band, obtained transmit rate 0.8 Mbps may be impossible to operate in VHF band, and bandwidth, for operating the number of the MASS presented in section 4.1, was not sufficient.
As described in section 2.2, the LTE-M used 700 MHz of the UHF band has transfer rate as a minimum 1 Mbps in bandwidth of the UL and DL, 10MHz , respectively. Applying the calculated spectrum requirements of the CNPC to the LTE-M, the number of the MASS, as mentioned in section 4.1, would not be operated at the same time due to excess of the bandwidth. Whereas, a single MASS with the transmit rate 0.8 Mbps can be operated within bandwidth of the LTE-M due to less than 10 MHz of the DL and the UL, respectively.
According to MUNIN project carried out from 2012 to 2015, they noted that the ship control systems should be designed to operate with different levels of communication quality. Three levels are suggested with respectively 4 Mbps, 128 Kbps and low bandwidth rendezvous services via state of the art satellite communication [4],[5]. In addition, Global Xpress (5 to 50 Mbit/s) was considered for available satellite communication link of the MASS. State of the art satellite communication is possible to obtain required bandwidth according to the user’s demand. Therefore, as a result of applying the spectrum requirement of the CNPC to the satellite communications, it may be possible to operate the single MASS or the several MASS. Consequently, the satellite communication link may be more efficient than the terrestrial communication link because a number of the MASS can be operated at sea under control of the MCS due to securing the spectrum requirement of the CNPC. However, satellites normally have a more restricted link budget than terrestrial communication system as power must be generated from limited area solar panels and also because transmission distances are much longer.
A drawback with the calculation of the spectrum requirements of the CNPC is that it only relied on [17] because calculation methods for the MASS has been not existed at present. For this reason, in order to obtain the accurate spectrum requirements of the CNPC, it is necessary to measure suitable factors for the MASS (e.g., reuse factor, redundancy factor, utilization factor, and frequency efficiency).
5. Conclusion
In this paper, appropriate maritime frequency bands were analyzed and verified amongst communication systems via the calculation result of the spectrum requirements of the CNPC. In order to obtain the spectrum requirements, following steps was carried out: (ⅰ) obtained the information transmit rates of the CNPC per the MASS ; (ⅱ) estimated the density of the MASS per AIS cell in the Incheon sea area; (ⅲ) calculated the spectrum requirements using factors (e.g., reuse factor, redundancy factor, utilization factor, and frequency efficiency); and (ⅳ) determined a total of the spectrum requirements of the CNPC. The results of applying to the existing and state of the art communication system represented that satellite communication system is suitable for safe operation of the MASS, in terms of bandwidth, transmit rate, and transmit distance. However, in case of using the satellite communication system, it is imperative to invest huge budget for operation of the MASS.
A further study is required to obtain the appropriate values of the factors based on characteristics of the MASS operation system in order to measure the accurate spectrum requirements of the CNPC, and it is necessary to demonstrate the calculation result in comparison with experiment via communication systems (e.g., VHF band , UHF band, and state of the art satellite) at real sea area.
Conflict of Interest
The author declares no conflict of interest.
- IMO MSC., “Regulatory scoping exercise for the use of Maritime Autonomous Surface Ships (MASS),” MSC 99th session, MSC.99/INF.22, London, 2018.
- ITU-R SG, “Characteristics of unmanned maritime systems,” The Meeting of working party 5B, Document 5B/841, Bucharest, Romania, 2015.
- IMO MSC., “The IMO regulatory framework and its application to Marine Autonomous Systems,” MSC 95th session, MSC.95/INF.20, London, 2015.
- Ørnulf Jan Rødseth, Beate Kvamstad, and Thomas Porathe, “Communication Architeture for an Unmmaned Merchant Ship,” IEEE OCEANS 2013, Bergen, Norway, June, 2013.
- Ørnulf Jan Rødseth, Åsmund Tjora, and Pål Baltzersen, MUNIN Deliverable D4.5: Architecture specification, available at http://www.unmanned-ship.org, MRTK, MUNIN-FP7 GA-No.314286, Aug. 2013.
- Marko Höyhtyä, Jyrki Huusko, Markku Kiviranta, Kenneth Solberg and Juha Rokka, “Connectivity for Autonomous Ships: Architecture, Use Caes, and Research Challenges,” 8th International Conference on ICT Convergence, Oct, 2017.
- Ho Namgung, “A Study on Concept Design of Communication System for Safe Navigation of Unmmaned Surface Vehicle,” Master Mokpo National Maritime University. Mokpo, 2016.
- Nathaniel Bowditch, The American Practical Navigator, 2002 Bicentennial Ed. Pub. No.9, National Imagery and Mapping Agency, Bethesda, Maryland, 799, 2002.
- IMO, The Convention on the International Regulations for Preventing Collisions at Sea, 1972,
- IMO, The International Convention on Standards of Training Certification and Watchkeeping for Seafarers, 1978, as amended, Consolidated Ed. 2011.
- IMO, The International Convention for the Safety of Life at Sea, Consolidated Ed. 2012.
- Society of Maritime Industries UK, An Industry Code of Practice, A Voluntary Code Version 1.0, 2017.
- Ministry of Oceans and Fisheries, Report of planning Research for the Development of Korea e-navigation, 2013.
- Ministry of Oceans and Fisheries, National Strategy for the Development and Implementation of e-navigation, 2013.
- Korea Institute of S&T Evaluation and Planning, The Report of the Preliminary Feasibility Study on the SMART-navigation project, 2015.
- ITU-R, “Technical characteristics for an automatic identification system using time division multiple access in the VHF maritime mobile frequency band,” Rec. ITU-R M.1371-5, 2014.
- ITU-R, “Characteristics of unmanned aircraft systems and spectrum requirements to support their safe operation in non-segregated airspace” Rep.2171-5, FEB. 2009.
- Korea Communication Commision, “A study on additional spectrum forecast for mobile broadband,” 2011.