Research on Dynamic Vehicle Model Equipped Active Stabilizer Bar
Volume 4, Issue 4, Page No 271-275, 2019
Author’s Name: Anh Nguyen Tuan1,a), Binh Hoang Thang2
View Affiliations
1Mechatronics-Automobile Department, Ha Noi University of Business and Technology, Viet Nam
2Automotive Engineering Department, Ha Noi University of Science and Technology, Viet Nam
a)Author to whom correspondence should be addressed. E-mail: taae177@gmail.com
Adv. Sci. Technol. Eng. Syst. J. 4(4), 271-275 (2019); ![]() DOI: 10.25046/aj040434
DOI: 10.25046/aj040434
Keywords: Active stabilizer bar, Rollover, Anti-roll moment, Roll angle, Dynamic vehicle model

Export Citations
Vehicles are rollover when steering at high speed, this phenomenon is limited by increasing the anti-roll moment of the suspension system. This research focuses on analyzing and establishing the dynamic model of vehicle when steering and describes the dependence of the vehicle body’s roll angle on other factors. Research has shown that when equipped a stabilizer bar it will significantly reduce the roll angle of the vehicle body. Besides, this research shows the outstanding advantages of active stabilizer bar with other stabilizer bars. Therefore, most of the vehicle should be equipped active stabilizer bar to ensure stability and safety when moving.
Received: 30 May 2019, Accepted: 27 July 2019, Published Online: 07 August 2019
1. Introduction
1.1. Rollover of the vehicle
When the vehicle goes on the road with high speed and the driver suddenly changes the direction, the centrifugal force appears. This force tends to go out of the rotating arc, cause the center of sprung mass to change, the moment causes the rolled vehicle will appear, denoted by M1 [1].
![]() Where:
Where:
MF: Moment of centrifugal force.
MP: Moment of gravitation.
Assume that M2 is the anti-roll moment of the vehicle, this moment is caused by the suspension system.
If:
M2 M1 M2max: The vehicle body is tilted.
M1 > M2max: The vehicle is rollover.
Therefore, to limit the rollover of the vehicle is necessary to reduce the moment M1. In fact, this value can’t control, the alternative solution is to increase the value of anti-roll moment M2 by adding an extra elastic part [2].
The problem of horizontal instability of the vehicle has been studied by foreign scientists as well as proposed many options, one of the solutions offered is to use stabilizer bar [3, 4]. However, previous studies often concentrate on the passive stabilizer bar on the vehicle with a linear single-track model and a half model [5]. This paper focuses on establishing space dynamic vehicle model equipped active stabilizer bar to limit the roll angle of the vehicle when steering.
1.2. Equipped stabilizer bar on the vehicle
To increase the value of the anti-roll moment M2 is necessary to increase the stiffness of the suspension system. Today, vehicles are often equipped the stabilizer bar to link the two wheels of an axle [6]. The stiffness and size of the stabilizer bar are proportional to the vehicle’s mass, the larger vehicle requires a stabilizer bar with a larger diameter and harder. Therefore, it will have a significant impact on the smoothness of the vehicle when moving on the road.
With the above problem, instead of using normal mechanical stabilizer bar, some middle-class and high-class vehicles were equipped stabilizer bar with electric or hydraulic control. The active stabilizer bar has the advantage of reducing the roll angle when steering and limiting the impact to the smoothness when moving on the bumpy road.
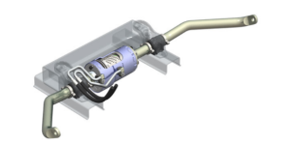 Figure 1: Active stabilizer bar
Figure 1: Active stabilizer bar
2. Dynamic vehicle model
2.1. Dynamic vehicle model 7 DOF
Consider the model of the vehicle to show in Figure 2. This section, the oscillation includes the vertical oscillation (z) and the horizontal oscillation (jx) because the vehicle steers at a stable velocity and the road surface are considered to be flat, it is possible to ignore longitudinal oscillation of the vehicle (jy).
Suppose that:
Using the method of separation of objects, according to [7] equations describing vertical displacement and roll angle of suspended mass:
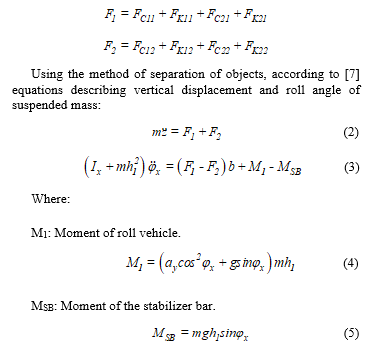 Ix: Moment of inertia around the x-axis.
Ix: Moment of inertia around the x-axis.
h1: The distance from the center of gravity to the roll axis.
The equation describes the vertical displacement of unsprung mass:
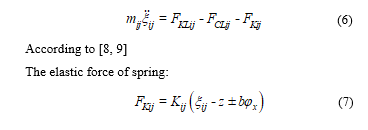
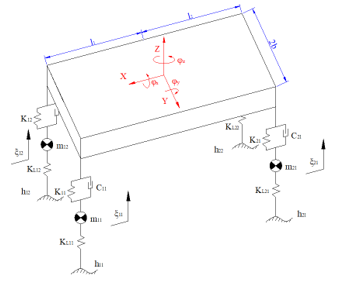 Figure 2: Dynamic vehicle model 7 DOF
Figure 2: Dynamic vehicle model 7 DOF
The resistive force of damping:
 2.2. Double track dynamic vehicle model
2.2. Double track dynamic vehicle model
The body vehicle is tilted caused by lateral acceleration when steering. Place the dynamic vehicle model 7 DOF on the road plane (Oxy), the vehicle performs 3 movements include longitudinal movement (x), lateral movement (y) and movement around the vertical axis (jz). For each of the above unknowns, there will be a corresponding equation describing the movement of the vehicle.
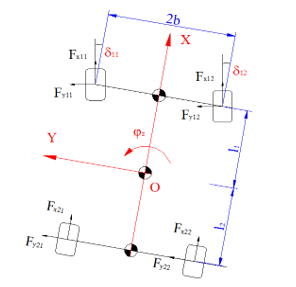 Figure 3: Double track dynamic vehicle model
Figure 3: Double track dynamic vehicle model
Assume that the steering wheel angle d is very small and ignore Mz at the wheel. According to [10] the equation describes the movement of the vehicle in the case of constant velocity in the form:
 With:
With:
If the deformation wheel is considered in the linear domain, the lateral force of the wheel is determined by the following formula:
![]() Where:
Where:
Ca: Side stiffness of the tire.
a: Slip angle of the tire.
Table 1: Specifications of the vehicle
| Description | Symbol | Value |
| Distance from center to front axle | l1 | 1110 (mm) |
| Distance from center to rear axle | l2 | 1655 (mm) |
| Base width | 2b | 1500 (mm) |
| Distance from center of gravity to roll center | h1 | 480 (mm) |
| Sprung mass | m | 1700 (kg) |
| Unsprung mass | mij | 45
(kg) |
3. Simulate the oscillation of the vehicle
3.1. The dependence of the roll angle on the velocity
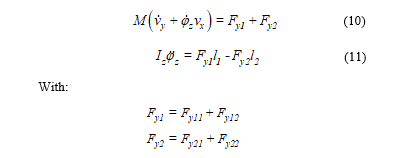
Steering angle I as shown in Figure 4, the simulation is carried out when the vehicle is moving with velocities v1 = 60 km/h and v2 = 90 km/h.
From the graph in Figure 5, it can be seen that at v = 60 km/h, when the equipped with passive stabilizer bar, the roll angle decreases from 3.80 to 3.10. If the velocity increases to 90 km/h, this value, in turn, decreases from 5.20 to 4.30. Therefore, it can be concluded that the vehicle’s roll angle depends on velocity.
3.2. The dependence of the roll angle on the central height
For vehicles with a high center of gravity, the distance from the center of gravity to roll center is changed, this affects the vehicle’s roll angle when steering. In the condition of the vehicle moving at the velocity v = 60 km/h, the steering angle is as shown in Figure 4, the correlation between the roll angle jx and the distance h1 is described through the graph below.
 Figure 4: Steering angle I
Figure 4: Steering angle I
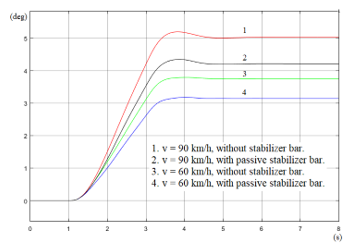 Figure 5: Roll angle depends on velocity
Figure 5: Roll angle depends on velocity
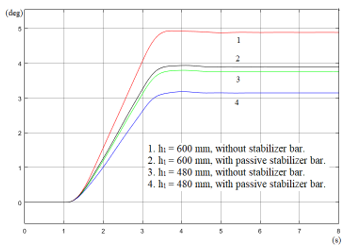 Figure 6: Roll angle depends on h1
Figure 6: Roll angle depends on h1
In the graph in Figure 6, when the vehicle is equipped the stabilizer bar is the vehicle’s roll angle jx decreases from 3.80 to 3.10 with the distance h1 = 0.48 m. When the height of vehicle increases, the distance between the center of gravity and roll center h1 = 0.6 m, the corresponding angle value is 4.90 and 3.90. Therefore, large-sized vehicles are often unstable when steering at high velocity.
3.3. The dependence of the roll angle on the steering angle
In the condition of driving with a larger angle d as shown in Figure 7 at v = 60 km/h, the dependence between the vehicle’s roll angle and steering angle is shown in Figure 8.
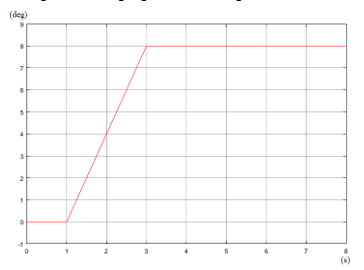 Figure 7: Steering angle II
Figure 7: Steering angle II
When the value of steering angle d increases, it also means that the roll angle of the vehicle jx increases. If the vehicle has the stabilizer bar, it will greatly reduce this value.
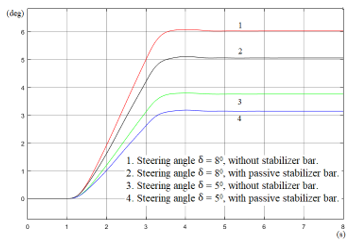 Figure 8: Roll angle depends on steering angle
Figure 8: Roll angle depends on steering angle
From the graph in Figure 5, Figure 6 and Figure 8, it can be seen that when the vehicle has a stabilizer bar, the vehicle’s roll angle will decrease depending on the working mode. If equipped with a passive stabilizer bar, there will be some disadvantages as follows:
+ The small size bar will not be able to withstand the constant load change, especially for high-mass, high-velocity vehicles.
+ The big size bar will be difficult to arrange in the vehicle and increase the mass isn’t suspended. Therefore, it causes strong fluctuations when entering the bumpy road.
+ The ability to minimize the vehicle’s roll angle is limited in dangerous situations.
For these reasons, today active stabilizer bar is gradually put to use in the middle-class and high-class vehicle.
3.4. The vehicle equipped active stabilizer bar
The active stabilizer bar is controlled based on input parameters such as vehicle’s roll angle, center height, displacement of the suspension system,… Control rules are established based on basic mathematical models such as linear models, nonlinear models, static models, dynamic models,… In this study, the moment by the active stabilizer bar is controlled according to the following rule:
At the first mode
 where:
where:
MA: Moment of the active stabilizer bar.
Ct: Control coefficient; Ct = 11000.
Ck: Activation coefficient.
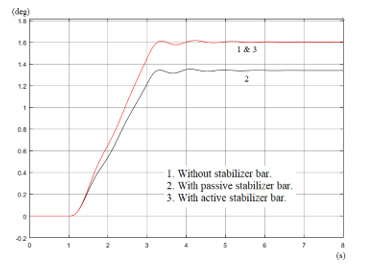 Figure 9: Roll angle at v = 30 km/h
Figure 9: Roll angle at v = 30 km/h
When the vehicle’s roll angle jx < 2.00, the stabilizer bar will not activate. If the roll angle exceeds this value, it will activate at (1) corresponding to the coefficient Ck1 = 27. In case of vehicle’s roll angle value jx > 4.00, the active stabilizer bar will activate at (2) corresponding to the coefficient Ck2 = 45, the value of the anti-roll moment that the bar providers is increased more so that the vehicle’s roll angle is significantly reduced.
The steering angle is shown in Figure 4 and v = 30 km/h, the vehicle’s roll angle is determined through the figure above.
Since the car moves at low velocity, the vehicle’s roll angle is not large, so the active stabilizer bar hasn’t been activated. With the above conditions, if the velocity increases to 60 km/h, the active stabilizer bar will be activated. At this time, the electric motor (hydraulic) will produce the torque impacting to two parts of the bar, reducing the vehicle’s roll angle. However, at v = 60 km/h, the stabilizer bar is only activated at mode 1, so the angle jx, when equipped active stabilizer bar, is only equivalents to the passive stabilizer bar (Figure 10).
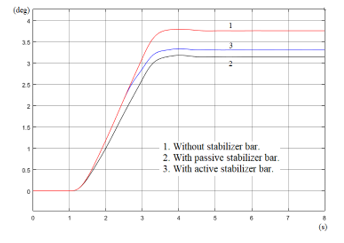 Figure 10: Roll angle at v = 60 km/h
Figure 10: Roll angle at v = 60 km/h
In case the vehicle moves at v =120 km/h and the center height is also increased, the value of h1 = 0.6 m. The active stabilizer bar is activated at mode 2, the vehicle’s roll angle jx is significantly reduced (Figure 11).
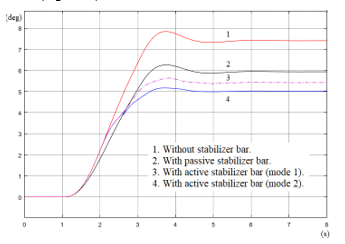 Figure 11: Roll angle at v = 120 km/h
Figure 11: Roll angle at v = 120 km/h
With the above moving conditions, if the vehicle isn’t equipped with a stabilizer bar, the vehicle can rollover. When the passive stabilizer bar is equipped, the vehicle’s roll angle can be reduced, but because the stiffness of the bar is constant, it hasn’t fully utilized the effect of the bar. In case, it can be seen that the active stabilizer bar has superiority over both cases.
4. Conclusion
The rollover phenomenon usually occurs when the roll angle is too large. This value depends on the velocity, center height, and steering angle of the vehicle. When the vehicle steers with high velocity, it is very easy to appear in this situation, the vehicle needs to be equipped stabilizer bar to limit this phenomenon. Research has shown that the vehicle’s roll angle is significantly reduced when equipped stabilizer bar and shown the outstanding advantages of the active stabilizer bar compared to the passive stabilizer bar.
In the case of the vehicle’s roll angle is small, the active stabilizer bar doesn’t activate, so the smoothness of the vehicle will not be affected. When the value jx reaches the required threshold, the bar will activate and act as active stabilizer bar. In the case of roll angle is too big, the bar will switch to the second mode to significantly reduce the vehicle’s roll angle, thereby making the vehicle more stable.
The study only focused on establishing the dynamic vehicle model equipped stabilizer bar and conducting simulation by Matlab – Simulink software. The parameters are referenced based on actual vehicles, the simulation was conducted under ideal conditions and not to mention the influence of external factors. Therefore, it is necessary to have empirical verification to make accurate statements.
- N. T. Anh, T. T. Tran, H. T. Binh, P. H. Nam, L. T. Dung, “Study on the Method of Calculating and Designing Stabilizer Bar on the Vehicle Using Solidworks Software”, Viet Nam Mechanical Engineering Journal, 7(12), 92– 99, 2018.
- N. K. Trai, N. T. Hoan, H. H. Hai, P. H. Huong, N. V. Chuong, T. M. Hoang, Structure Vehicle, Bach Khoa Ha Noi Publishing, 2010.
- P. Bravin, T. Kshitijit, P. Amit, K. Ganesh, “Design, Analysis and Optimization of the Anti-roll Bar”, Journal of Engineering Research and Applications, 4(9), 137–140, 2014.
- A. N. Khartode, M. U. Gaikwad, “Design and Analysis of Anti-roll Bar for Automotive Application”, International Journal on Recent and Innovation Trends in Computing and Communication, 4(6), 340–345, 2016.
- P. H. Dong, “Establish on the Lateral Roll Model of the FAW 29 Seats, Produce and Assemble in Viet Nam”, Master Thesis, Ha Noi University of Science and Technology, 2015.
- J. N. Husen, A. M. Naniwadekar, “Analysis of Anti-roll Bar of a Passenger Car for its Nonlinear Behavior with Help of CAE”, International Journal of Science Technology & Engineering, 2(1), 133–136, 2015.
- V. V. Huong, N. T. Dung, D. N. Khanh, D. H. Phuc, Dynamics Vehicle, Viet Nam Educational Publishing, 2014.
- G. A. Hassaan, N. A. Mohdsamin, “Vehicle Dynamics Response to Road Hump Using a 10 Degrees of Freedom Full-car Model”, International Journal of Computer Techniques, 2(1), 56–62, 2015.
- V. Muniandy, P. Mohdsamin, H. Jamaluddin, R. A. Rahman, S. A. Abubakar, “Double anti-roll bar hardware-in-loop experiment for the active anti-roll control system”, Journal of Vibroengineering, 19(4), 2886–2909, 2017.
- N. T. Anh, “Research the Dynamic Vehicle Model Equipped Active Stabilizer Bar”, Master Thesis, Ha Noi University of Science and Technology, 2019.
Citations by Dimensions
Citations by PlumX
Google Scholar
Scopus
Crossref Citations
- Tuan Anh Nguyen, Francesco Lo Iudice, "Improving the Stability of the Passenger Vehicle by Using an Active Stabilizer Bar Controlled by the Fuzzy Method." Complexity, vol. 2021, no. 1, pp. , 2021.
- Duc Ngoc Nguyen, Tuan Anh Nguyen, Xingling Shao, "A Hybrid Control Algorithm Fuzzy-PI with the Second Derivative of the Error Signal for an Active Suspension System." Mathematical Problems in Engineering, vol. 2022, no. , pp. 1, 2022.
- Duc Ngoc Nguyen, Tuan Anh Nguyen, Angelo Marcelo Tusset, "Enhancing the performance of the vehicle active suspension system by an Optimal Sliding Mode Control algorithm." PLOS ONE, vol. 17, no. 12, pp. e0278387, 2022.
- Nguyen Tuan Anh, Hoang Thang Binh, Tran The Tran, "Optimization of the Stabilizer Bar by Using Total Scores Method." Advances in Science, Technology and Engineering Systems Journal, vol. 5, no. 1, pp. 431, 2020.
- Peng Wang, Yuan Ge, Shanggui Cao, Chao Han, Ping Yang, Zhichao Zhang, Ramadoni Syahputra, "Coordinated Control of ESP-SAS System Considering Roll." Journal of Robotics, vol. 2022, no. , pp. 1, 2022.
- Duc Ngoc Nguyen, Tuan Anh Nguyen, "Evaluate the stability of the vehicle when using the active suspension system with a hydraulic actuator controlled by the OSMC algorithm." Scientific Reports, vol. 12, no. 1, pp. , 2022.
- Duc Ngoc Nguyen, Tuan Anh Nguyen, Ngoc Duyen Dang, "A complex rollover dynamics model with active stabilizer bar controlled by the fuzzy algorithm." Heliyon, vol. 8, no. 11, pp. e11715, 2022.
- Tuan Anh Nguyen, "Enhancing the lateral stability of the vehicle by using a fuzzy algorithm to control the active stabilizer bar." Journal of Intelligent & Fuzzy Systems, vol. 44, no. 6, pp. 9723, 2023.
- Duc Ngoc Nguyen, Tuan Anh Nguyen, Angelos Markopoulos, "Investigate the Relationship between the Vehicle Roll Angle and Other Factors When Steering." Modelling and Simulation in Engineering, vol. 2023, no. , pp. 1, 2023.
- Duc Ngoc Nguyen, Ngoc Duyen Dang, Thi Thu Huong Tran, Thang Binh Hoang, Tuan Anh Nguyen, Houari Ameur, "Effect of the Passive Stabilizer Bar on the Vehicle’s Stability." Modelling and Simulation in Engineering, vol. 2022, no. , pp. 1, 2022.
- Tuan Anh Nguyen, "Preventing the Rollover Phenomenon of the Vehicle by Using the Hydraulic Stabilizer Bar Controlled by a Two-Input Fuzzy Controller." IEEE Access, vol. 9, no. , pp. 129168, 2021.
- Duc Ngoc Nguyen, Minh Phung Le, Tuan Anh Nguyen, Thang Binh Hoang, Thi Thu Huong Tran, Ngoc Duyen Dang, Min Ye, "Enhancing the Stability and Safety of Vehicle When Steering by Using the Active Stabilizer Bar." Mathematical Problems in Engineering, vol. 2022, no. , pp. 1, 2022.
- Tuan Anh Nguyen, He Chen, "Using a novel fuzzy 3-inputs algorithms to control the active hydraulic stabilizer bar with the complex model of the vehicle nonlinear dynamics." PLOS ONE, vol. 18, no. 3, pp. e0282505, 2023.
- Zien Zhang, Abdul Hadi Abd Rahman, Noraishikin Zulkarnain, Tao Zhang, "Enhancing Vehicle Lateral Stability: A DDPG-Based Active Anti-Roll Bar Control Strategy." IEEE Access, vol. 12, no. , pp. 153030, 2024.
- Yash Rajendra Shirke, Jayant S. Karajagikar, P Ramani Ranjan Senapati, Maneetkumar R. Dhanvijay, "Intelligent Safety Braking System for High Speed Vehicle on Curved Road for Rollover Prevention." In 2023 Innovations in Power and Advanced Computing Technologies (i-PACT), pp. 1, 2023.
No. of Downloads Per Month
No. of Downloads Per Country