Optimal Discrete-time Sliding Mode Control for Nonlinear Systems Subject to Input Constraints
Volume 4, Issue 4, Page No 141-146, 2019
Author’s Name: Olfa Jedda1,a), Ali Douik2
View Affiliations
1National Engineering School of Monastir, University of Monastir, Monastir, Tunisia
2National Engineering School of Sousse, University of Sousse, Sousse, Tunisia
a)Author to whom correspondence should be addressed. E-mail: olfa_jedda@outlook.com
Adv. Sci. Technol. Eng. Syst. J. 4(4), 141-146 (2019); ![]() DOI: 10.25046/aj040417
DOI: 10.25046/aj040417
Keywords: Discrete-time sliding mode control, Particle swarm optimization, Control input constraints, Chattering phenomenon, Inverted pendulum system

Export Citations
In this paper, an optimal discrete-time sliding mode control is proposed for single-input single-output nonlinear systems with input constraints. The sliding surface is designed on the basis of particle swarm optimization algorithm in order to optimize the system response characteristics while ensuring the follow-up of reference model in presence of constraints. Moreover, the controller is developed such that the elimination of chattering phenomenon, the finite-time convergence and the stability of the closed loop system are guaranteed. Performed on an inverted pendulum system, simulation results demonstrate the e_ectiveness of the proposed approach over the discrete-time sliding mode controller using the saturation function and the discrete-time second order sliding mode controller in terms of fast response.
Received: 04 March 2019, Accepted: 01 July 2019, Published Online: 22 July 2019
1. Introduction
This paper is an extension of work originally presented in 2018 15th International Multi-Conference on Systems, Signals and Devices (SSD) [1]. Due to the increasing use of computers in control applications, discrete-time sliding mode control (DSMC) has been extensively developed since its appearance with Milosavljevic in 1985 [2]; see, for example, [3–9]. However, the finite sampling time negatively impacts the robustness of continuous-time sliding mode control to external disturbances, parametric uncertainties and modeling errors [10–12]. In fact, the control input remains constant during the sampling period so that it can not be changed when the trajectory of system state crosses the sliding surface. This is at the origin of chattering phenomenon that may badly affect control devices and system performances [13].
Introduced by Gao in 1995 [14], the quasi-sliding mode concept consists to drive the state trajectory to cross the sliding hyperplane in finite-time, to move with a non-increasing zigzag motion and to remain within a specified layer. Thus, the above-mentioned drawback can be reduced but not eliminated. Several approaches was proposed in the literature to overcome it. In [15–17], the saturation function is used as smooth one instead of the sign function which is the origin of discontinuity. In [18–20], discrete-time second order sliding mode control (DSOSMC) was proposed for linear and nonlinear systems. In [21, 22], a piecewise-constant control is used to generate the discrete-time sliding mode. It ensures that the chatter effect is avoided and the system state trajectory convergences to the sliding surface after a finite-time interval.
In the following, an optimal discrete-time sliding mode control (ODSMC) is proposed for single-input single-output (SISO) nonlinear systems with input constraints. Particle swarm optimization (PSO) algorithm is employed to search the sliding vector to which corresponds the optimal response characteristics of the closed-loop system and its behavior follows the reference model. Developed by Eberhart and Kennedy in 1995 [23], PSO algorithm is based on food searching behavior of animals societies having no leaders in their swarm such as bird flocks and fish schools. Its main advantages are the easiness of implementation, the robustness in controlling parameters and the good efficiency in solving nonlinear, nondifferentiable and large search space problems [24,25]. Regarding the control law, it is designed in such a way that chattering phenomenon is eliminated, the convergence to the sliding manifold is ensured in finitetime and the system dynamics are stable while respecting constraints.
The efficiency of the proposed controller will be demonstrated by applying it to an inverted pendulum system and by comparing it to DSMC controller using the saturation function and to DSOSMC controller with an arbitrary choice of control parameters and without taking into account the input constraints.
This paper is organized as follows. The DSMC and DSOSMC controllers are developed for SISO nonlinear systems in sections 2 and 3. Section 4 is devoted for the design of the proposed ODSMC controller. The inverted pendulum system is represented in section 5. Section 6 illustrates numerical simulation results. Concluding remarks are given in section 7.
2. Discrete-time Sliding Mode Control
Consider a class of discrete-time SISO nonlinear system described by
 where x(k) ∈ IRn×1 is the state vector, u(k) ∈ IR is the control input, and y(k) ∈ IR is the system output. F (x(k)) ∈ IRn×1 and H (x(k)) ∈ IRn×1 are vectors of nonlinear functions and C is the output matrix. Let’s admit that H and its pseudoinverse H+ are both bounded.
where x(k) ∈ IRn×1 is the state vector, u(k) ∈ IR is the control input, and y(k) ∈ IR is the system output. F (x(k)) ∈ IRn×1 and H (x(k)) ∈ IRn×1 are vectors of nonlinear functions and C is the output matrix. Let’s admit that H and its pseudoinverse H+ are both bounded.
The sliding function is defined as follows
 where e(k) = x(k) − xd (k) is the tracking error and cT ∈ IR1×n is the sliding vector chosen such that the sliding dynamic s(k) ≡ 0 is asymptotically stable. The reaching law is given by
where e(k) = x(k) − xd (k) is the tracking error and cT ∈ IR1×n is the sliding vector chosen such that the sliding dynamic s(k) ≡ 0 is asymptotically stable. The reaching law is given by ![]()
where 0 < 1 − qTs < 1, ε > 0, Ts is the sampling period and sat is the saturation function defined as follows
 with ϕ > 0 is the boundary layer width of s and sign is the sign function.
with ϕ > 0 is the boundary layer width of s and sign is the sign function.
Using the reaching law (3) and the forward expression of the sliding function (2), the control law u(k) is given by
 3. Discrete-time Second Order Sliding Mode Control
3. Discrete-time Second Order Sliding Mode Control
The sliding function defined in [19,20] is given by
![]() with β ∈ [0,1[ in order to ensure the stability of σ(k). The control law is given by
with β ∈ [0,1[ in order to ensure the stability of σ(k). The control law is given by
![]() where ueq(k) is the equivalent control used to force the system state to evolve on the sliding manifold and ud(k) is the discontinuous control used to ensure the robustness.
where ueq(k) is the equivalent control used to force the system state to evolve on the sliding manifold and ud(k) is the discontinuous control used to ensure the robustness.
Setting σ(k+1) = σ(k) = 0, the equivalent control ueq(k) is determined from the following relation
4. Optimal Discrete-time Sliding Mode Control
4.1. Design of Sliding Surface
The sliding vector cT is determined using the PSO algorithm in order to ensure the optimization of the closed-loop system response characteristics and the follow-up of the reference model in the presence of constraints on control input.
PSO algorithm starts with population of np ndimensional particles. The ith particle of the swarm has a position xi = xi,1,…, xi,n and a velocity vi = vi,1,…,vi,n. Its previously best visited position and the global best particle in the swarm are denoted by pbesti = pbest ,…, pbesti,n and gbest respectively. The velocity and the position of each particle are updated as follows
 with i = 1,…,np and j = 1,…,n. w is the inertia weight, α1,2 are positive constant so-called the acceleration coefficients and r1,2 are random parameters uniformly distributed within [0,1] at each generation.
with i = 1,…,np and j = 1,…,n. w is the inertia weight, α1,2 are positive constant so-called the acceleration coefficients and r1,2 are random parameters uniformly distributed within [0,1] at each generation.
PSO is used to generate the sliding vector that minimizes the following cost function
 where tr is the rise-time, ts is the settling-time, Mp is the overshoot, Ess is the steady-state error and λq , q = 1,…,4, are their corresponding weights.
where tr is the rise-time, ts is the settling-time, Mp is the overshoot, Ess is the steady-state error and λq , q = 1,…,4, are their corresponding weights.
As illustrated in Table 1, the iterative process is repeated until stopping criterion is met.
Table 1: Description of PSO algorithm
Step 1 Parameter settings
Set the population size np, the minimum and maximum bounds xmin = xmin,1,…, xmin,n and xmax = xmax,1,…, xmax,n, and the acceleration coefficients α1,2.
Step 2 Initialization
Initialize the particle’s position xi0, i = 1…np, randomly and uniformly within bounds. Initialize the particle’s velocity v0i and the particle’s best position to its initial position, i.e. pbesti0 = xi0.
Set gbest equal to the global best particle.
Step 3 PSO algorithm
WHILE stopping criterion is not met DO
Update the particle’s velocity and position
FOR i = 1 to np
FOR j = 1 to n
vi,j = wvi,j + α1r1 pbesti,j − xi,j +
α2r2 gbestj − xi,j
END FOR xi = xi + vi
END FOR
Update the particle’s best position
FOR i = 1 to np
IF f (xi) ≺ f (pbesti) pbesti = xi
END IF
END FOR
Update the global best position
FOR i = 1 to np
IF f (pbesti) ≺ f (gbest) gbest = pbesti
END IF
END FOR
END WHILE
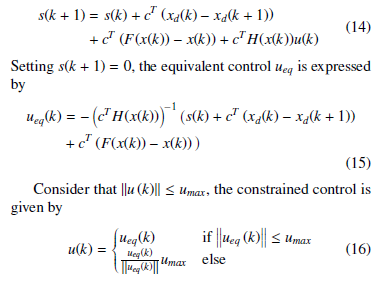
4.2. Design of Control Law
The control law is designed such that the chatter effect is avoided, the state trajectory convergences to the sliding surface after a finite-time interval and the closed-loop system is stable while respecting control constraints.
The forward expression of the sliding function (2) can
be rewritten as follows
Suppose that
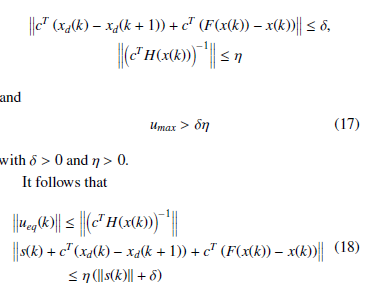
For ku(k)k > umax, the forward expression of the sliding function (14) is expressed by
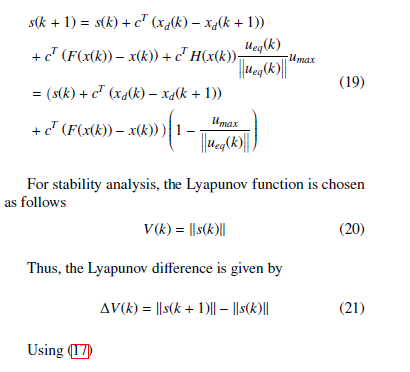 For stability analysis, the Lyapunov function is chosen as follows
For stability analysis, the Lyapunov function is chosen as follows
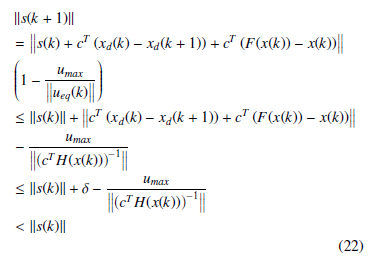 Hence, s(k) decreases monotonically. From (18), the equivalent control ueq (k) will belong to the constrained domain, i.e. ueq umax, in finite time and therefore it will bring the system trajectory to the sliding manifold s(k) = 0 on which the dynamics of the closed-loop system are stable.
Hence, s(k) decreases monotonically. From (18), the equivalent control ueq (k) will belong to the constrained domain, i.e. ueq umax, in finite time and therefore it will bring the system trajectory to the sliding manifold s(k) = 0 on which the dynamics of the closed-loop system are stable.
5. Inverted Pendulum System
As shown in Figure 1, the inverted pendulum system consists of a pendulum amounted on a cart at a frictionless pivot point. The pendulum is of mass m = 0.1kg and length 2l = 1m and the cart is of mass M = 1kg [26]. u is the force applied to the cart that lies within the range of ±10N and g = 9.81m/s2 is the gravity acceleration. The generalized coordinates are x and θ which represents the horizontal movement of cart and the rotation of pendulum respectively [27].
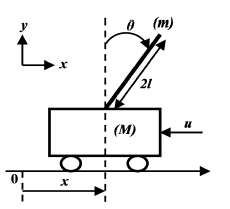 Figure 1: Schematic of the inverted pendulum system
Figure 1: Schematic of the inverted pendulum system
Let x = x1 x2 = θ θ˙ be the state vector. The dynamic equations are given by

6. Numerical Simulation Results
For Ts = 0.05s, the reference model is chosen as follows
The sliding vector and the reaching law parameters for DSMC controller are respectively

where wmax = 0.9 and wmin = 0.4 are the initial and final values of the inertia weight respectively, iter is the current iteration, and itermax is the maximum number of iterations.
Figure 2 illustrates the evolution of the cost function (29) corresponding to ODSMC controller. It shows that PSO algorithm ensures a rapid convergence of the cost function to its minimum value of 0.236s corresponding to the following sliding vector
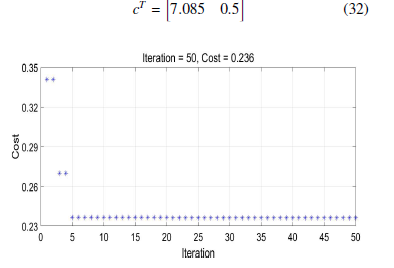 Figure 2: Evolution of the cost function for ODSMC
Figure 2: Evolution of the cost function for ODSMC
Figure 3 shows numerical simulation results of ODSMC controller using the sliding vector (32). Figures 3a-3b present the state variables x1,2(k) and their corresponding references xd1,2(k). They show that the developed controller ensures the follow-up of the reference model and the stability of the closed-loop system in the presence of control input constraints. Figure 3c depicts the constrained control input u(k). It shows that chatter effect is avoided. Figure 3d illustrates the sliding function s(k). It shows that the state trajectory converges to the sliding surface in finite time.
- State variable x1(k) and its reference xd1(k)
- State variable x2(k) and its reference xd2(k)
- Control input u(k)
- Sliding function s(k)
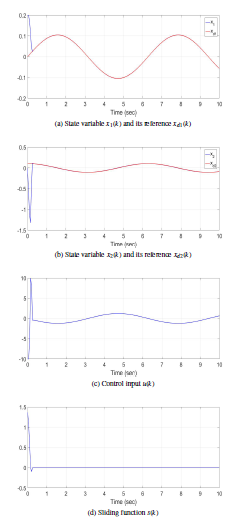 Figure 3: Simulation results for ODSMC controller.
Figure 3: Simulation results for ODSMC controller.
Figure 4 illustrates a comparison between DSMC with saturation function, DSOSMC and ODSMC controllers. Figure 4a presents a comparison of system responses y(k). It shows that all controllers ensure the follow-up of the reference model. Yet, the ODSMC controller ensures the fastest response time while respecting input constraints. Figure 4b depicts a comparison of control inputs u(k). It shows the effectiveness of the applied controllers in avoiding the chattering phenomenon. Moreover, the developed algorithm has lower values of control input in the initial phase than DSOSMC controller.
The results are summarized in Table 2. Actually, It shows that the developed ODSMC ensures the best results with the least rise and settling times of 0.14s and 0.24s respectively, and with lower values of control input than DSOSMC controller whose corresponding minimum and maximum input values are −20.6N and 12.18N respectively. Figure 4 and Table 2 demonstrate that ODSMC controller outperforms DSMC and DSOSMC controllers.
- Comparison of system responses
- Comparison of control inputs
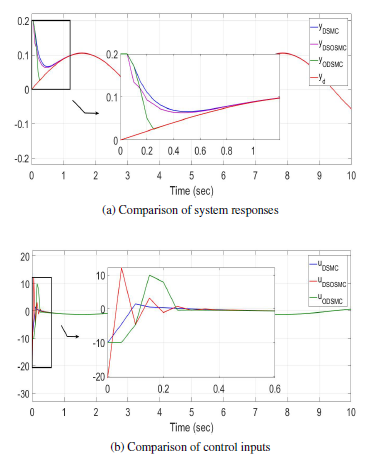 Figure 4: Comparison between DSMC with saturation function, DSOSMC and ODSMC controllers.
Figure 4: Comparison between DSMC with saturation function, DSOSMC and ODSMC controllers.
Table 2: Summary table of numerical results
| Settling time (s) | Rise time (s) | umin | umax | |
| DSMC | 1.07 | 0.39 | -10.07 | 1.5 |
| DSOSMC | 1.03 | 0.37 | -20.6 | 12.18 |
| ODSMC | 0.24 | 0.14 | -10 | 10 |
In this study, Matlab 2016a was used for the implementation of all algorithms.
7. Conclusion
This work presents an optimal discrete-time sliding mode controller for nonlinear SISO systems subject to input constraints. The particle swarm optimization algorithm is employed to determine the sliding vector for which the response characteristics are optimal and the closed-loop system model follows the reference model. Furthermore, the control law which is designed based on the equivalent control concept guarantees the avoidance of chattering phenomenon and the finite-time convergence of system trajectory to the sliding manifold on which the system dynamics are stable while respecting constraints. Simulation results demonstrate the efficiency of the developed controller in ensuring the fastest response comparing to discrete-time sliding mode controller using the saturation function and to discrete-time second order sliding mode controller. Future work will be to develop the proposed controller to multi-input multi-output nonlinear systems and to verify its effectiveness by experiments.
Conflict of Interest
The authors declare no conflict of interest.
- O. Jedda, A. Douik, “Optimal Discrete-Time Sliding Mode Control for Nonlinear Systems” in 15th International Multi-Conference on Systems, Signals & Devices (SSD), Hammamet Tunisia, 2018. 10.1109/SSD.2018.8570376
- C. Milosavljevic, “General Conditions for the Existence of a Quasi-Sliding Mode on the Switching Hyperplane in Discrete Variable Structure Systems” Autom. Remote Control, 14(3), 307-317, 1985.
- K. Furuta, “Sliding Mode Control of a Discrete System” Systems & Control Letters, 14(2), 145-152, 1990. https://doi.org/10.1016/0167-6911(90)90030-X
- G. Golo, C. Milosavljevic, “Robust Discrete-time Chattering Free Sliding Mode Control” Systems & Control Letters, 41(1), 19-28, 2000. https://doi.org/10.1016/S0167-6911(00)00033-5
- S. Z. Sarpturk, Y. Istefanopulos, O. Kaynak, “On the Stability of Discrete-time Sliding Mode Control Systems” IEEE Trans. Autom. Control, 32(10), 930-932, 1987. 10.1109/TAC.1987.1104468
- Y. Niu, D. W. Ho, Z. Wang, “Improved sliding mode control for discrete-time systems via reaching law” IET Control Theory Appl., 4(11), 2245-2251, 2010. 10.1049/iet-cta.2009.0296
- J. Hu, Z. Wang, H. Gao, L. K. Stergioulas, “Robust H sliding mode control for discrete time-delay systems with stochastic nonlinearities” J. Frankl. Inst., 349(4), 1459-1479, 2012. https://doi.org/10.1016/j.jfranklin.2011.05.018
- M. C. Pai, “Discrete-time sliding mode control for robust tracking and model following of systems with state and input delays” Nonlinear Dyn., 76(3), 1769-1779, 2014. https://doi.org/10.1007/s11071-014-1245-0
- H. Du, X. Yu, M. Z. Chen, S. Li, “Chattering-free discretetime sliding mode control” Automatica, 68, 87-91, 2016. https://doi.org/10.1016/j.automatica.2016.01.047
- B. Bandyopadhyay, F. Deepak, K. S. Kim, Sliding Mode Control Using Novel Sliding Surfaces, Springer, 2009.
- I. U. VADIM, “Survey paper variable structure systems with sliding modes” IEEE Trans. Autom. Control, 22(2), 1977.
- K. D. Young, V. I. Utkin, U. Ozguner, “A Control Engineers Guide to Sliding Mode Control” IEEE Trans. Control Syst. Technol., 7(3), 328-342, 1999. 1063-6536(99)03275-3
- W. Perruquetti, J. P. Barbot, Sliding Mode Control in Engineering, M. Dekker, 2002.
- W. Gao, Y. Wang, A. Homaifa, “Discrete-time Variable Structure Control Systems” IEEE Trans. Ind. Electron., 42(2), 117-122, 1995. 10.1109/41.370376
- J.-h. Kim, S.-H. Oh, J. K. Hedrick, “Robust Discrete-time Variable Structure Control Methods” J DYN SYST-T ASME, 122(4), 766-775, 2000. 10.1115/1.1320448
- J.-h. Kim, D.-i. D. Cho, “Discrete-time Variable Structure Control using Recursive Switching Function” in Proceedings of the 2000 American Control Conference, Chicago IL USA, 2000. 10.1109/ACC.2000.876673
- O. Jedda, A. Douik, “Discrete-time Integral Sliding Mode Control with Anti-windup” Studies in Informatics and Control, 27(4) 413-422, 2018. https://doi.org/10.24846/v27i4y201805
- A. Y. Alanis, N. Arana-Daniel, C. Lopez-Franco, E. N. Sanchez,“PSO-gain Selection to Improve a Discrete-time Second Order Sliding Mode Controller” in IEEE Congress on Evolutionary Computation, Cancun Mexico, 2013. 10.1109/CEC.2013.6557672
- M. Mihoub, A. S. Nouri, R. B. Abdennour, “The Multimodel Approach for a Numerical Second Order Sliding Mode Control of Highly non Stationary Systems” in American Control Conference, Seattle WA USA, 2008. 10.1109/ACC.2008.4587240
- M. Mihoub, A. S. Nouri, R. B. Abdennour, “Real-time Application of Discrete Second Order Sliding Mode Control to a Chemical Reactor” Control Eng. Pract., 17(9), 1089-1095, 2009. https://doi.org/10.1016/j.conengprac.2009.04.005
- G. Bartolini, A. Ferrara, V. I. Utkin, “Adaptive Sliding Mode Control in Discrete-time Systems” Automatica, 31(5), 769-773, 1995. https://doi.org/10.1016/0005-1098(94)00154-B
- B. Castillo-Toledo, S. Di Gennarob, A.G. Loukianov, J. Rivera, “Discrete time Sliding Mode Control with Application to Induction Motors” Automatica, 44(12), 3036-3045, 2008. doi:10.1016/j.automatica.2008.05.009
- J. Kennedy, R. Eberhart, “Particle Swarm Optimization” in Proceedings of IEEE International Conference on Neural Networks, Perth Australie, 1995. 10.1109/ICNN.1995.488968
- J. C. Bansal, P. Singh, M. Saraswat, A. Verma, S. S. Jadon, A. Abraham, “Inertia Weight Strategies in Particle Swarm Optimization” in 3rd World Congress on Nature and Biologically Inspired Computing, Salamanca Spain, 2011. 10.1109/NaBIC.2011.6089659
- D. P. Rini, S. M. Shamsuddin, S. S. Yuhaniz, “Particle Swarm Optimization: Technique, System and Challenges” Int. J. Comput. Appl., 14(1), 19-26, 2011. 10.5120/ijais-3651
- L. X. Wang, “A Supervisory Controller for Fuzzy Control Systems that Guarantees Stability” IEEE Trans. Autom. Control, 39(9), 1845-1847, 1994. 10.1109/9.317109
- O. Jedda, J. Ghabi, A. Douik, “Sliding Mode Control of an Inverted Pendulum” In Applications of Sliding Mode Control, Springer Singapore, 105-118, 2017.
- J. Xin, G. Chen, Y. Hai, “A Particle Swarm Optimizer with Multistage Linearly-Decreasing Inertia Weight” in International Joint Conference on Computational Sciences and Optimization (CSO),Sanya Hainan China, 2009. 10.1109/CSO.2009.420
- Y. Shi, R. C. Eberhart, “Empirical Study of Particle Swarm Optimization” in Proceedings of the 1999 Congress on Evolutionary Computation, Washington DC USA, 1999. 10.1109/CEC.1999.785511
Citations by Dimensions
Citations by PlumX
Google Scholar
Scopus
Crossref Citations
No. of Downloads Per Month
No. of Downloads Per Country