Noise Cancellation Algorithm Based on Air- and Bone-Conducted Speech Signals by Considering an Unscented Transformation Method
Volume 4, Issue 2, Page No 305-313, 2019
Author’s Name: Hisako Orimotoa), Akira ikuta
View Affiliations
Prefectural University of Hiroshima, Faculty of Management and Information System, 734-8338, Japan
a)Author to whom correspondence should be addressed. E-mail: orimoto@pu-hiroshima.ac.jp
Adv. Sci. Technol. Eng. Syst. J. 4(2), 305-313 (2019); ![]() DOI: 10.25046/aj040239
DOI: 10.25046/aj040239
Keywords: Noise Cancellation, Speech Signal, Air- and Bone-conducted, UT Method

Export Citations
Noise control is essential when applying speech recognition in noisy environments such as factories. In this study, a signal processing for noise cancellation is proposed by using a noise-insensitive bone-conducted speech signal together with an air-conducted speech signal. The speech signal is generally expressed by a nonlinear model. The extended Kalman filter is very famous as a state estimation method for nonlinear systems. However, this filter needs a linearized approximation model for the nonlinear systems. By using the sample point called Sigma point, the unscented Kalman filter (UKF) can be applied to the nonlinear system model without linear approximation. In this study, new type method is proposed based on the UKF. Although UKF considers Gaussian noise, an extended UKF considering non-Gaussian noise is proposed. A noise cancellation method is derived by use of air- and bone-conducted speech signals. The validity of this method is investigated by using both conducted speech signals measured in a noisy real environment.
Received: 22 February 2019, Accepted: 10 April 2019, Published Online: 12 April 2019
1. Introduction
Recently, speech recognition systems are used in car navigation systems and smart speakers etc.. However, speech recognition can not be performed effectively in circumstances with heavy noises. Therefore, some countermeasures against surrounding noise are indispensable in such situations.
Kalman filter has been applied to many noisy circumstances as a noise cancellation method for speech signal [1],[2],[3]. This filter assumes a linear model subject to white and Gaussian noise as the system equation and the observation equation [4],[5]. Though, the extended Kalman filter (EKF) [6] can be applied to nonlinear systems, linear approximation models of nonlinear systems are required. Therefore, many improvements are necessary for the noise cancellation method to apply it to actual speech signal processing. From the above viewpoint, in our preciously reported study, a noise cancellation method was proposed by using air- and bone-conducted speech signals in the situation contaminated by non-Gaussian and non-white noises [7].
However, since the calculation of the expansion coefficients in the previous algorithm was very complicated, a simplified method is required.
On the other hand, the unscented Kalman filter (UKF) by use of unscented transformation (UT) method can be applied to nonlinear system[9]. The UT method is a technique for calculating the statistics of a random variable that has been nonlinearly transformed. The set of samples on so-called sigma points(σ-points) are chosen so that they capture the specific properties of the underlying distribution. Therefore, this method can be applied to arbitrary nonlinear systems. In our previous study, a noise cancellation method based on only air conducted speech signal has been proposed by applying the UT method [8].
In this study, a new noise cancellation algorithm based on air- and bone-conducted speech signals is proposed by considering the UT method. The relationship between airconducted speech signal and backgrand noise is expressed as an additive model based on the additive property of sound pressure. However, propagation mechanism of boneconducted speech signal is complicated and has to be considered as an unknown system in general. Therefore, a system model including unknown parameters is introduced in this study. More specifically, the sample points obtained by using the UT method are introduced. The noise cancellation algorithm is derived by use of an expansion expression of Bayes’ theorem. This method can be considered non-Gaussian properties of noises and nonlinear correlation information between the speech signal and observation. Furthermore, the validity of the proposed method is experimentally confirmed by applying it to real speech signal with noises.
2. Theory
2.1 Modeling of Air- and Bone-Conducted Speech Signals
We consider the original speech signal xk, observed airconducted speech signal yk and bone-conducted speech signal zk at discrete time k. The observation yk is contaminated by a surrounding noise vk. According to the additive property of sound pressure, the following relationship can be established.
![]() where the mean and variance of vk are known. In order to derive the propagation model of the bone-conducted speech signal, the correlation information between xk and zk is required. However, it is difficult to obtain prior information on the unknown speech signal xk. In this study, a new adaptive algorithm for noise cancellation is proposed by introducing a propagation model with unknown parameters between xk and zk as the bone-conducted speech signal model for zk:
where the mean and variance of vk are known. In order to derive the propagation model of the bone-conducted speech signal, the correlation information between xk and zk is required. However, it is difficult to obtain prior information on the unknown speech signal xk. In this study, a new adaptive algorithm for noise cancellation is proposed by introducing a propagation model with unknown parameters between xk and zk as the bone-conducted speech signal model for zk:
![]() where wk is a random noise (mean : 0,variance1) and ak and bk are unknown parameters.
where wk is a random noise (mean : 0,variance1) and ak and bk are unknown parameters.
2.2 Estimation Method Combined Bayes’ Theorem with UT Method
The conditional joint probability distribution of the specific signal xk and the unknown parameters ak and bk is expressed by using expansion expression of Bayes’ theorem[10]. To simplify the derivation process of the estimation algorithm, σ-points and the weighting coefficients are introduced in expansion coefficients.
The conditional probability distribution of xk, ak and bk is expressed as
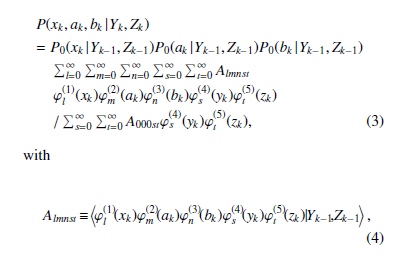 where Yk(= {y1,y2,…,yk}) and Zk(= {z1,z2,…,zk}) are sets of air- and bone-conducted speech signal data up to time k. The above five functions ϕ(1)l (xk),ϕ(2)m (ak), ϕ(3)n (bk),ϕ(4)s (yk) and ϕ(5)t (zK) are orthonormal polynomials of degrees l,m,n, s and t with weighting functions P0(xk | Yk−1,Zk−1), P0(ak |Yk−1,Zk−1), P0(bk | Yk−1,Zk−1), P0(yk | Yk−1,Zk−1), P0(zk | Yk−1,Zk−1), which can be chosen as the probability functions describing the dominant part of the fluctuation. As the examples of standard probability functions, Gaussian distribution is adopted:
where Yk(= {y1,y2,…,yk}) and Zk(= {z1,z2,…,zk}) are sets of air- and bone-conducted speech signal data up to time k. The above five functions ϕ(1)l (xk),ϕ(2)m (ak), ϕ(3)n (bk),ϕ(4)s (yk) and ϕ(5)t (zK) are orthonormal polynomials of degrees l,m,n, s and t with weighting functions P0(xk | Yk−1,Zk−1), P0(ak |Yk−1,Zk−1), P0(bk | Yk−1,Zk−1), P0(yk | Yk−1,Zk−1), P0(zk | Yk−1,Zk−1), which can be chosen as the probability functions describing the dominant part of the fluctuation. As the examples of standard probability functions, Gaussian distribution is adopted: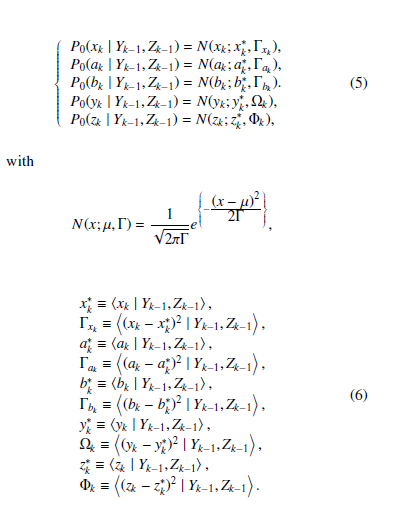
The orthonormal polynomials[11] with five weighting probability distributions in Eq. (5) are then specified as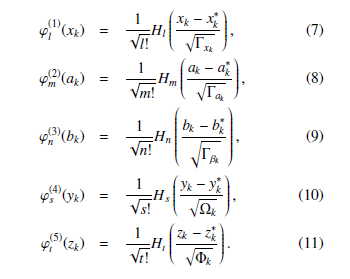
The estimates for mean and variance (i.e., conditional mean and variance) of xk, ak, bk, which are the first and second order statistics, can be expressed as follows: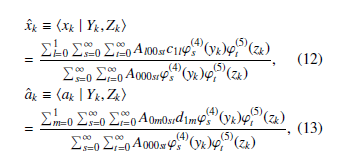
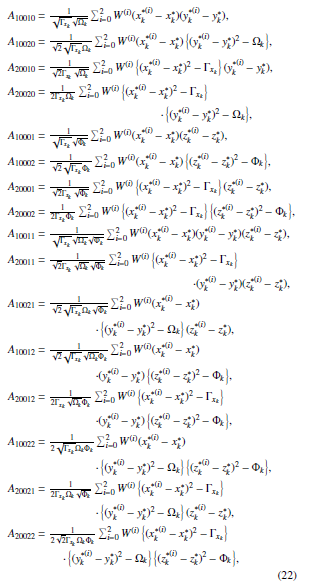
Here, the weighing coefficients W(i) have to satisfy the normalization constraint.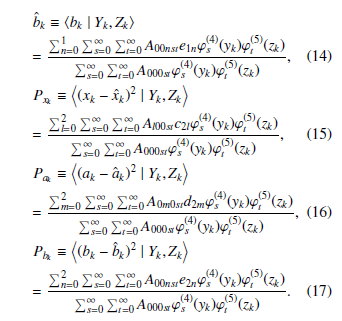
By using the UT method, the expansion coefficients de A20001 =W fined by (4) can be realized for arbitrary nonlinear systems.When the UT method is applied to approximate the means∗(i) ∗(i) A20002 = 2ΓxkΦk 2i=0 W(i) n(xk∗(i) − xk∗)2 − Γxkon(z∗k(i) − z∗k)2 − Φko, and variances of xk, ak, bk, yk and zk, the σ-points xk , ak , b∗k(i), y∗k(i) and z∗k(i) are obtained as sample points, as follows: A10011 = √Γxk √1Ωk √Φk P2i=0 W(i)(xk∗(i) − xk∗)(y∗k(i) − y∗k)(z∗k(i) − zk∗),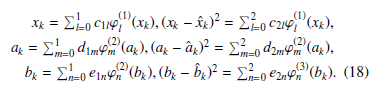

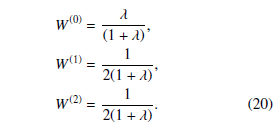
The σ-points are decided so as to obtain the approximately same mean and variance as original variables. Where λ is a regulation parameter. The weights to be used are obtained as follows:
 The expansion coefficients of bk, yk and zk(A00110, A00120, A00210, A00220, A00101, A00102, A00201, A00202, A00111, A00211, A00121, A00112, A00212, A00122, A00221, A00222) are calculated through the same manners.
The expansion coefficients of bk, yk and zk(A00110, A00120, A00210, A00220, A00101, A00102, A00201, A00202, A00111, A00211, A00121, A00112, A00212, A00122, A00221, A00222) are calculated through the same manners.
After substituting (1) (2) into the definition of four parameters y∗k,Ωk,z∗k and Φk in (6), the following expressions can be derived.
 In order to derive the predicted values of the speech signal xk and the unknown parameters ak, bk, the time transition of the speech signal xk is expressed as follows.
In order to derive the predicted values of the speech signal xk and the unknown parameters ak, bk, the time transition of the speech signal xk is expressed as follows.
 The state estimation algorithm with expansion coefficient
The state estimation algorithm with expansion coefficient
Almnst reflecting linear and nonlinear correlation information among variables and statistics of non-Gaussian noise is completed.
3. Experiment
In order to confirm the validity of the proposed noise cancellation algorithm, we compared it with the method using only the air-conducted speech signal. The compared method was derived by considering the following conditional probability distribution.
 Male and female speech signals were used in the experiment. The speech signal data were measured in the anechoic chamber in the acoustic laboratory. The observed speech signal are contaminated with the white noise, the pink noise and the machine noise respectively. The spectra of these noises are shown in Figures 1-3. Furthermore, the observation data of air-conduced speech signal were created by mixing noises with speech signal on a computer.
Male and female speech signals were used in the experiment. The speech signal data were measured in the anechoic chamber in the acoustic laboratory. The observed speech signal are contaminated with the white noise, the pink noise and the machine noise respectively. The spectra of these noises are shown in Figures 1-3. Furthermore, the observation data of air-conduced speech signal were created by mixing noises with speech signal on a computer.
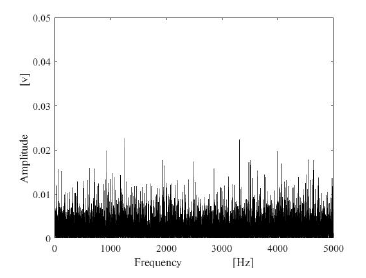 Figure 1: Spectrum of white noise.
Figure 1: Spectrum of white noise.
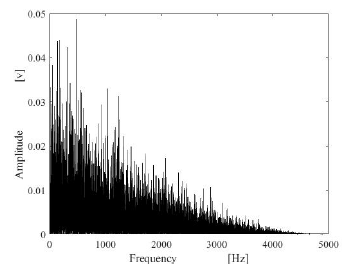 Figure 2: Spectrum of pink noise.
Figure 2: Spectrum of pink noise.
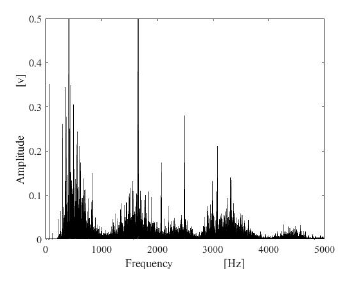 Figure 3: Spectrum of machine noise.
Figure 3: Spectrum of machine noise.
Table 1 shows the specifications of the personal computer for signal processing in the experiment. The signal processing time for speech signal of about 3.5 seconds in length was from 0.5 to 0.8 seconds.
Table 1: The specifications of the personal computer.
| Specification | |
| PC | Dell Vostro 3650 |
| CPU | Intel Core i7-6700 @ 3.40GHz |
| MEMORY | 8.00G |
| OS | Win 10 Pro 64bit |
As an evaluation method of estimation result, the Root Mean Square Error (RMSE) and Performance Evaluation Index (PEI) are adopted.
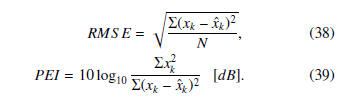 As the RMS Error is smaller value, the better estimation result is obtained. On the other hand, the larger the PEI is, the better the estimation is. Table 2 and Table 3 show the results for the male speech signal and a female speech signal respectively. In the cases of lower noises, almost the same estimation results are obtained in the proposed method and the compared method. On the other hand, in the case of higher noises, the proposed method obtains better results than the compared method. Furthermore, in comparison with our previous method [7] with complicated algorithm, almost the same accurate estimation results are obtained as the proposed method. Therefore, the superiority of the proposed method adopting the simplified algorithm could be confirmed.
As the RMS Error is smaller value, the better estimation result is obtained. On the other hand, the larger the PEI is, the better the estimation is. Table 2 and Table 3 show the results for the male speech signal and a female speech signal respectively. In the cases of lower noises, almost the same estimation results are obtained in the proposed method and the compared method. On the other hand, in the case of higher noises, the proposed method obtains better results than the compared method. Furthermore, in comparison with our previous method [7] with complicated algorithm, almost the same accurate estimation results are obtained as the proposed method. Therefore, the superiority of the proposed method adopting the simplified algorithm could be confirmed.
Table 2: Comparisons of RMSE and PEI for a male speech signal.
- white noise
| Proposed method | Compared method | |||
| S/N | RMSE | PEI | RMSE | PEI |
| 1/1 | 0.0160 | 6.8438 | 0.0163 | 6.7057 |
| 1/2 | 0.0225 | 3.8693 | 0.0269 | 2.3286 |
| 1/3 | 0.0267 | 2.4111 | 0.0450 | -2.1282 |
| 1/4 | 0.0330 | 0.5615 | 0.0838 | -7.5301 |
| 1/5 | 0.0480 | -2.6982 | 0.1338 | -11.6004 |
- pink noise
| Proposed method | Compared method | |||
| S/N | RMSE | PEI | RMSE | PEI |
| 1/1 | 0.0192 | 5.2693 | 0.0207 | 4.6124 |
| 1/2 | 0.0281 | 1.9414 | 0.0345 | 0.1846 |
| 1/3 | 0.0322 | 0.7773 | 0.0626 | -4.9946 |
| 1/4 | 0.0419 | -1.5062 | 0.0823 | -7.3776 |
| 1/5 | 0.0669 | -5.5803 | 0.1334 | -11.5703 |
- machine noise
| Proposed method | Compared method | |||
| S/N | RMSE | PEI | RMSE | PEI |
| 1/1 | 0.0238 | 3.4024 | 0.0272 | 2.2381 |
| 1/2 | 0.0313 | 1.0116 | 0.0489 | -2.8538 |
| 1/3 | 0.0399 | -1.0931 | 0.0767 | -6.7613 |
| 1/4 | 0.0586 | -4.4310 | 0.1080 | -9.7397 |
| 1/5 | 0.0686 | -5.8003 | 0.1409 | -12.0497 |
Some of the waveform summarized in Tables 2 and 3 are shown in Figures 4-23. Figures 4 and 14 show the original speech signals of male and female, respectively. Figures 5, 8, 11, 15, 18 and 21 show the speech signals contaminated by noises with amplitude of 3 times larger than the original signals. The estimated results by using of proposed method are shown in Figures 6, 9, 12, 16, 19 and 22. On the other hand, the comparison results are shown in Figures 7, 10, 13, 17, 20 and 23. In the cases of contaminated by white noise and pink noise, the better results are obtained by the proposed method than the compared method.
Table 3: Comparisons of RMSE and PEI for a female speech signal.
- white noise
| Proposed method | Compared method | |||
| S/N | RMSE | PEI | RMSE | PEI |
| 1/1 | 0.0134 | 4.8382 | 0.0104 | 7.0371 |
| 1/2 | 0.0159 | 3.3213 | 0.0160 | 3.2779 |
| 1/3 | 0.0180 | 2.2390 | 0.0195 | 1.5406 |
| 1/4 | 0.0198 | 1.4447 | 0.0273 | -1.3608 |
| 1/5 | 0.0260 | -0.9548 | 0.0457 | -5.8342 |
- pink noise
| Proposed method | Compared method | |||
| S/N | RMSE | PEI | RMSE | PEI |
| 1/1 | 0.0136 | 4.656 | 0.0128 | 5.2366 |
| 1/2 | 0.0176 | 2.4293 | 0.0211 | 0.8777 |
| 1/3 | 0.0231 | 0.0790 | 0.0271 | -1.297 |
| 1/4 | 0.0241 | -0.2875 | 0.0374 | -4.1092 |
| 1/5 | 0.0264 | -1.0874 | 0.0510 | -6.8009 |
- machine noise
| Proposed method | Compared method | |||
| S/N | RMSE | PEI | RMSE | PEI |
| 1/1 | 0.0147 | 3.9846 | 0.0168 | 2.8276 |
| 1/2 | 0.0207 | 1.0503 | 0.0237 | -0.1545 |
| 1/3 | 0.0293 | -1.9655 | 0.0499 | -6.6083 |
| 1/4 | 0.0456 | -5.8243 | 0.0553 | -7.5024 |
| 1/5 | 0.0425 | -5.2075 | 0.0660 | -9.0326 |
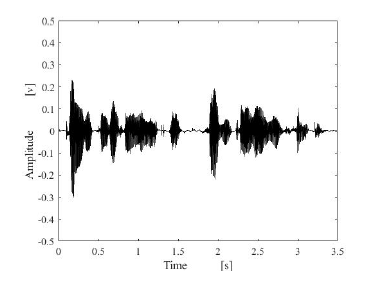 Figure 4: Original male speech signal
Figure 4: Original male speech signal
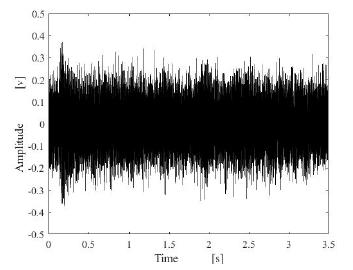 Figure 5: Male speech signal containing a white noise
Figure 5: Male speech signal containing a white noise
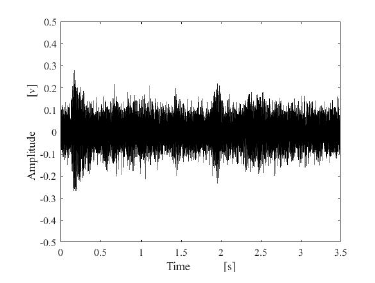 Figure 7: Estimated results by using compared method.
Figure 7: Estimated results by using compared method.
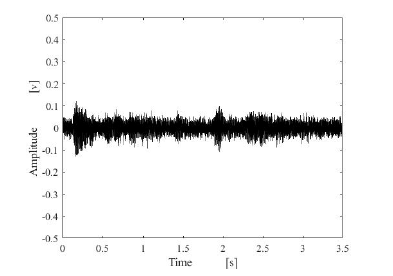 Figure 6: Estimated results by using proposed method.
Figure 6: Estimated results by using proposed method.
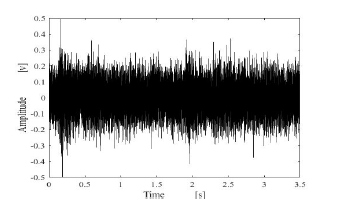 Figure 8: Male speech signal containing a pink noise
Figure 8: Male speech signal containing a pink noise
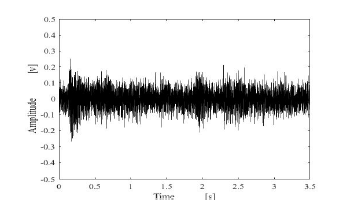 Figure 9: Estimated results by using proposed method.
Figure 9: Estimated results by using proposed method.
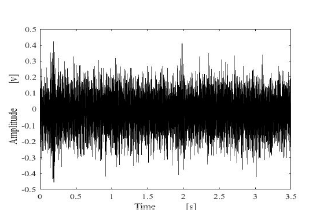 Figure 11: Male speech signal containing a machine noise
Figure 11: Male speech signal containing a machine noise
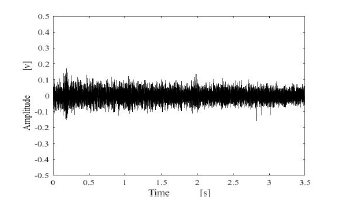 Figure 12: Estimated results by using proposed method.
Figure 12: Estimated results by using proposed method.
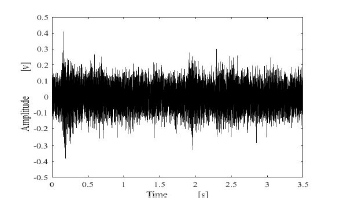 Figure 10: Estimated results by using compared method.
Figure 10: Estimated results by using compared method.
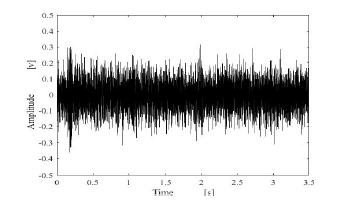 Figure 13: Estimated results by using compared method.
Figure 13: Estimated results by using compared method.
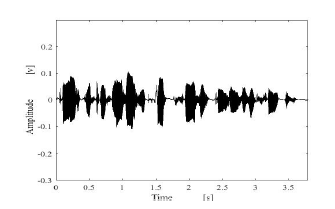 Figure 14: Original female speech signal
Figure 14: Original female speech signal
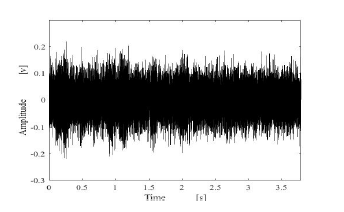 Figure 15: Female speech signal containing a white noise
Figure 15: Female speech signal containing a white noise
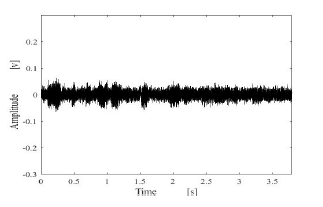 Figure 16: Estimated results by using proposed method.
Figure 16: Estimated results by using proposed method.
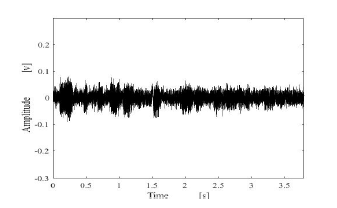 Figure 17: Estimated results by using compared method.
Figure 17: Estimated results by using compared method.
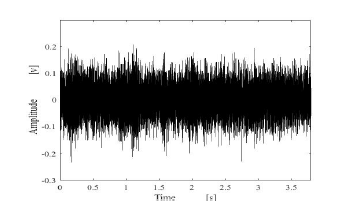 Figure 18: Female speech signal containing a pink noise
Figure 18: Female speech signal containing a pink noise
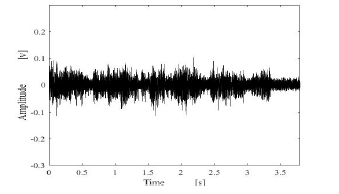 Figure 19: Estimated results by using proposed method.
Figure 19: Estimated results by using proposed method.
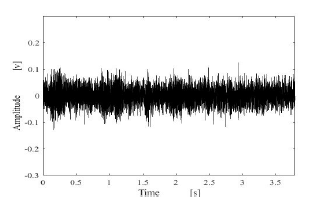 Figure 20: Estimated results by using compared method.
Figure 20: Estimated results by using compared method.
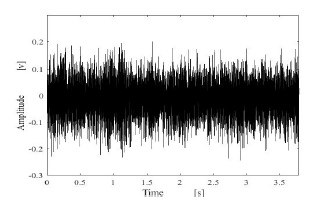 Figure 21: Female speech signal containing a machine noise
Figure 21: Female speech signal containing a machine noise
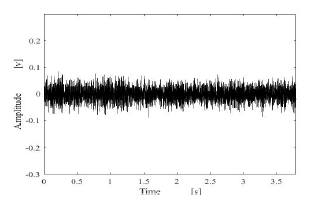 Figure 22: Estimated results by using proposed method.
Figure 22: Estimated results by using proposed method.
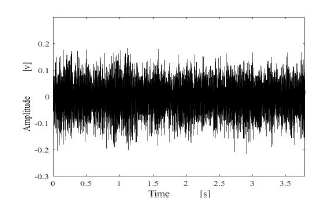 Figure 23: Estimated results by using compared method.
Figure 23: Estimated results by using compared method.
4. Conclusion
In this paper, a new method to suppress noise for speech signal has been proposed, which is applicable to actual environment with non-Gaussian and non-white noises. The aim of the proposed method is to improve the accuracy of estimation by using air- and bone-conducted speech signals.
The proposed method considered σ-points of not only xk but also unknown parameter ak, bk and observation values yk, zk. Moreover, this study has proposed a method including the higher order correlation information between σ-points. Our algorithm has been realized by utilizing the Bayes’ theorem as the fundamental principle of estimation and UT method using σ-points. Application of our algorithm has been made to real speech signal contaminated by noises. It has been revealed by experiments that better estimation results could be obtained by the proposed algorithm as compared with the method without using bone-conducted speech signal. However, we have not tried to apply the proposed algorithm to real speech recognition by use of a voice recognition software. Therefore, by applying the algorithm to speech recognition system, the effectiveness of the theory has to be confirmed experimentally.
The proposed approach is quite different from those traditional standard techniques. However, we are still in an early stage of development, and a number of practical problems are yet to be investigated in the future. These include: (i) Introduction of a realistic nonlinear model expressing the actual propagation characteristics of bone-conducted speech signal instead of the simple model in (2). (ii) Consideration of higher order expansion coefficients Almnst (l,m,n, s,t = 3), in the estimation algorithm. (iii) Selection of an optimal point to put the sensor to measure the bone-conducted speech signal.
- M. Gabrea, E. Grivel, and M. Najim, “A single microphone Kalman filter-based noise canceller”, IEEE Signal Process. Lett., 6 (3), 55-57, 1999.
- W. Kim, and H. Ko, gNoise variance estimation for Kalman filtering of noisy speech”, IEICE Trans. Inf. and Syst., E84-D (1), 155-160, 2001.
- N. Tanabe, T. Furukawa, and S. Tsuji, “Robust noise suppression algorithm with the Kalman filter theory for white and colored disturbance”, IEICE Trans. Fundamentals, E91-A (3), 818-829, 2008.
- R. E. Kalman, ”A new approach to linear filtering and prediction problems”, Trans. ASME, Series, D, J. Basic Engineering, 82 (1), 35-45, 1960.
- R. E. Kalman and R. S. Buch, ”New results in linear filtering and prediction theory”, Trans. ASME Series D, J. Basic Engineering, 83 (1), 95-108, 1961.
- H. J. Kushner, “Approximations to optimal nonlinear filter”, IEEE Trans. on Automatic Control, 12 (5), 546-556, 1967.
- A.Ikuta, H.Orimoto and G. Gallagher, “Noise suppression method by jointly using bone- and air-conducted speech signals”, Noise Control Engr. J. 66 (6), 472-488, 2018.
- H.Orimoto and A.Ikuta, “Signal processing for Noise cancellation method of speech signal by using an extension type UKF”, Proceedings of SIGNAL PROCESSING algorithms, architectures, arrangements, and applications (SPA), 304-309, 2018.
- James V. Candy, Bayesian Signal Processing Classical, Modern, and Particle Filtering Methods, Wiley-IEEE Press, 2009.
- M. Ohta and H. Yamada, “New Methodological Trials of Dynamical State Estimation for the Noise and Vibration Environmental System”, Acustica, 55 (4), 199-212, 1984.
- M. Ohta and T. Koizumi, “General statistical treatment of the response of a non-linear rectifying device to a stationary random input”, IEEE Trans. Inf. Theory, 14 (4), 595-598, (1968).
Citations by Dimensions
Citations by PlumX
Google Scholar
Scopus
Crossref Citations
- Shiming Zhang, Yosuke Sugiura, Tetsuya Shimamura, "Bone‐Conducted Speech Synthesis Based on Least Squares Method." IEEJ Transactions on Electrical and Electronic Engineering, vol. 17, no. 3, pp. 425, 2022.
No. of Downloads Per Month
No. of Downloads Per Country