Boundary gradient exact enlarged controllability of semilinear parabolic problems
Volume 2, Issue 5, Page No 167-172, 2017
Author’s Name: Touria Karite, Ali Boutoulouta)
View Affiliations
TSI Team, MACS Laboratory, Department of Mathematics & Computer Science, Institute of Sciences, Moulay Ismail University, Meknes. Morocco
a)Author to whom correspondence should be addressed. E-mail: boutouloutali@yahoo.fr
Adv. Sci. Technol. Eng. Syst. J. 2(5), 167-172 (2017); ![]() DOI: 10.25046/aj020524
DOI: 10.25046/aj020524
Keywords: Distributed systems, Parabolic systems, Boundary regional controllability sub-differential, Gradient, Lagrangian multiplier semilinear systems, Minimum energy

Export Citations
The aim of this paper is to study the boundary enlarged gradient controllability problem governed by parabolic evolution equations. The purpose is to find and compute the control  which steers the gradient state from an initial gradient one
which steers the gradient state from an initial gradient one  to a gradient vector supposed to be unknown between two defined bounds
to a gradient vector supposed to be unknown between two defined bounds  and
and  , only on a subregion
, only on a subregion  of the boundary
of the boundary  of the system evolution domain
of the system evolution domain  . The obtained results have been proved via two approaches, The sub-differential and Lagrangian multiplier approach.
. The obtained results have been proved via two approaches, The sub-differential and Lagrangian multiplier approach.
Received: 12 April 2017, Accepted: 04 May 2017, Published Online: 29 December 2017
1. Introduction
The concept of controllability has been widely developed since the sixties [1,2]. Later, the notion of regional controllability was introduced by El Jai [3,4], and interesting results have been obtained, in particular, the possibility to control a state only on a subregion ω of Ω. These results have been extended to the case where ω is a part of the boundary ∂Ω of the evolution domain Ω [5,6]. Then the concept of regional gradient controllability and regional enlarged controllability were introduced and developed for linear and semilinear systems [7–11]. Here instead of steering the system to a desired gradient, we are interested in steering its gradient between two prescribed functions given only on a boundary subregion Γ ⊂ ∂Ω of system evolution domain .
Many reasons are motivating this problem: first, the mathematical models are obtained from measurements or from approximation techniques and they are very often affected by perturbations. And the solution of such system is approximately known. Second, in many real problems the target required to be between two bounds. Moreover, there are many applications of gradient modeling. For example, controlling the concentration regulation of a substrate at the upper bottom of a bioreactor between two levels (see Figure1).
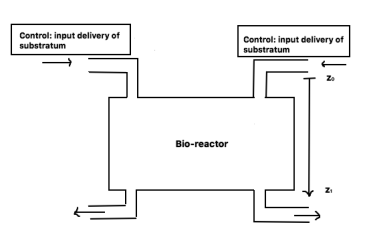 Figure 1: Regulation of the concentration flux of the substratum at the upper bottom of the bio-reactor
Figure 1: Regulation of the concentration flux of the substratum at the upper bottom of the bio-reactor
Motivated by the arguments above, in this paper, our goal is to study the regional boundary enlarged controllability of the gradient. For that we consider a semilinear system of parabolic equations where the control is exerted in an intern subregion ω of the system evolution domain Ω.
Thus, let Ω be an open bounded set of Rn(n ≥ 1) with regular boundary ∂Ω. We consider the Banach spaces L2(Ω) and H) with their corresponding norms. For a given T > 0, we denote QT = Ω×]0,T [, Σ = ∂Ω×]0,T [ and we consider the following problem
 γ : L2(Ω)n → H1/2(∂Ω)n is the extension of trace operator of order zero which is linear, continuous and surjective,
γ : L2(Ω)n → H1/2(∂Ω)n is the extension of trace operator of order zero which is linear, continuous and surjective,- yu (T ) is the mild solution of (2) at the time T
) [12]), and u is a the control function in the control space U = L2(0,T ;Rm) (where m is the number of actuators),
- A is linear, second order operator with dense domain such that the coefficients do not depend on t and generates a C0-semigroup (S(t))t≥0 on L2(Ω) which we consider compact,
- N : L2(0,T ;L2(Ω)) → L2(Ω) is a non linear k-
Lipschitz operator [13],
- B ∈ L Rm,L2(Ω) and y0 is the initial datum in L2(Ω).
The problem (1-2) is well-posed and has a unique solution.
The remainder contents of this paper are structured as follows. Some preliminary results are introduced in the next section. In section 3 we give the definitions of the gradient enlarged controllability on the boundary. Two approaches steering the system (2) from the initial gradient vector to a target gradient function between two bounds with minimum energy control is presented in section 4.
2. Preliminary results
In this section, we introduce some preliminary results to be used there after.
Let D be an open subset of L2(Ω), we consider the system in (2), where y0 ∈ D and y : [0,T ] → D. A continuous function u : [0,T ] → D is said to be a classical solution of (2) if u(0) = y0(x), u is differentiable on [0,T ]. and u(t) ∈ D for t ∈ [0,T ] and y satisfies (2) on [0,T ].
It is well known that if y is a classical solution of (2), then it satisfies the following:
 Definition 1 (14) A continuous function y from [0,T ] into D is called a mild solution of (2) if y satisfies the integral equation (3) on [0,T ].
Definition 1 (14) A continuous function y from [0,T ] into D is called a mild solution of (2) if y satisfies the integral equation (3) on [0,T ].
Let Γ ⊆ ∂Ω a part of the boundary with y(x,t) satisfies
(3), then the regional enlarged controllability on the boundary problem is concerned whether there exists a control u to steer the system (2) from the initial gradient vector ∇y0 to a gradient vector between two
n functions in H.
By [15], the adjoint of the gradient operator on a connected, open bounded subset Ω with a Lipschitz continuous boundary ∂Ω is the minus of the divergence operator. Then ∇∗ : (L2(Ω))n → H−1(Ω) is given by
 We recall the following definitions
We recall the following definitions
Definition 2 (16) The system (2) is exactly (resp.
weakly) gradient controllable on Γ if for every desired n
gradient gd(resp. for every > 0), there exists a control u ∈ U such that χΓ γ ∇yu(T ) = gd (resp.
k
We recall that an actuator is conventionally defined by a couple (D,f ), where D is a nonempty closed part of Ω, and it represents the geometric support of the actuator. And f ∈ L2(D) defines the spatial distribution of the action on the support D. For more details about the notion of actuators we refer the readers to [3,17].
We need also to recall this important result:
Theorem 1 Let (X,(·, ·)X , k · kX ), (Y,(·, ·)Y , k · kY ) be two Hilbert spaces and let A ⊆ X, B ⊆ Y be non-empty, closed, convex subsets. Assume that a real functional L : A × B → R satisfies the following conditions
∀µ ∈ B, v → L(v,µ) is convex and lower semicontinuous;
∀v ∈ A, µ → L(v,µ), is concave and upper semicontinuous.
Moreover,
- is bounded or lim L(v,µ0) = +∞ ∀µ0 ∈ B kv kX → ∞
v ∈ A
- is bounded or−∞
kµkY µ ∈ B
Then, the functional L has at least one saddle point.
Demonstration: For the proof of this theorem see [18].
3. Gradient enlarged controllability on the boundary
In this section, we give the definition of the concept of the gradient enlarged controllability on the boundary. To do so, we need to introduce the closed sub-vectorial space G of H01(Ω). Hence, we have the following definition:
Definition 3 Given T > 0. We say that there is gradient enlarged controllability on Γ, if, for every y0 (in a suitable functional space), we can find a control u such that χΓ γ ∇yu (T ) ∈ G
Remark 1 • This notion depends of course on the choice of the functional space G.
- If G = {0}, we retrieve the classical notion of the exact controllability.
- if G is the space skimmed by yu (T ), the notion is empty.
For the particular case, we will study the boundary gradient enlarged controllability in [ai(·),bi(·)] ∀i ∈ {1,…,n}. For that let’s consider (a(·))i and (b(·))i be two given functions in H1/2(Γ)n such that (a(·))i ≤ (b(·))i for i = 1,…,n a.e on Γ, and we set:
Θ = [a (·),b (·)] =
n(y1,…,yn) (·) ≤ yi(·) ≤ bi(·) a.e on Γo
for all i ∈ {1,…,n}
So the definition of the boundary gradient enlarged controllability in Θ is the following:
Definition 4 We say that (2) is Θ-gradient controllable on Γ at time T if there exist a command u ∈ U such that: χΓ γ ∇yu (T ) ∈ Θ ·
Let us define the following operators:
- The Duhamel operator H from U to H such that for u ∈ U:
 and the operator GΘ given by:
and the operator GΘ given by:
 Finally, the solution of the system (2) at the time T could be written as follow: yu (T ) = S(T )y0 +GΘy +Hu · And we have the following proposition:
Finally, the solution of the system (2) at the time T could be written as follow: yu (T ) = S(T )y0 +GΘy +Hu · And we have the following proposition:
Proposition 1 We say that system (2) is Θ-gradient controllable on Γ at time T if and only if:
ImχΓ γ ∇GΘ +Imχ
Demonstration: We suppose that the system (2) is Θgradient controllable on Γ at time T which is equivalent to write: χΓ γ ∇yu (T ) ∈ Θ. Hence we can write:
Hu= χΓ γ ∇S(T )y0 +χΓ γ ∇GΘy +χΓ γ ∇Hu.
And we have ∇S(T )y0 = 0, furthermore, let’s denote by: z1 = χΓ γ ∇GΘy, z2 = χΓ γ ∇Hu and z =
χΓ γ ∇yu (T ). Which leads to: z1 ∈ Im χΓ γ ∇GΘ
and z2 ∈ Im. Thus, z ∈ Im
Im χΓ γ ∇H and z ∈ Θ which gives:
ImχΓ γ ∇GΘ +Imχ
Conversely, we suppose that the following expression is verified:
ImχΓ γ ∇GΘ +Imχ,
then, there exists z ∈ Θ such that z ∈
ImχΓ γ ∇GΘ +ImχΓ γ ∇H . So z = z1 + z2 where z1 = χΓ γ ∇GΘy with y ∈ L2(0,T ;H )) and ∃ u ∈ U such that z2 = χΓ γ ∇Hu. Then z = χΓ γ ∇GΘy +χΓ γ ∇Hu. While χΓ γ ∇S(T )y0 = 0, one can write: z = χΓ γ ∇S(T )y0 +χΓ γ ∇GΘy +χΓ γ ∇Hu
Hence, z = χΓ γ ∇yu (T ) ∈ Θ, and we prove the equivalence.
Remark 2 1. The above definition means that we are interested in the transfer of the system (2) to an unknown state just in Θ.
- If Θ = {0} or ai(·) = bi(·) ∀i ∈ {0,1} we retrieve the regional exact controllability. So, for ai(·) , bi(·) the Θ-gradient controllability on Γ constitutes an extension of the regional controllability.
We can also characterize the enlarged controllability by using the notion of strategic actuators. And we can say:
Definition 5 The actuator (D,f ) is said to be Θ-strategic on Γ if the excited system is Θ-gradient controllable on Γ.
4. Computation of the control
In order to compute the control subject to our problem
(1-2), we will use two approaches. The first one relies on the subdifferential techniques and convex analysis and the second one on the Lagrangian multiplier approach.
4.1. Subdifferential approach
In this sub-section we are using the subdifferential techniques to compute the control steering the system from an initial gradient state to a final one between two functions on the boundary [19,20]. For that, we consider the optimization problem in (1).
 Let f be a nontrivial, lower semi-continuous, proper and convex function from a Hilbert space W to Re=] − ∞,+∞[. We denote F (W) the set of the functions f and k · k is the Hilbert norm of W.
Let f be a nontrivial, lower semi-continuous, proper and convex function from a Hilbert space W to Re=] − ∞,+∞[. We denote F (W) the set of the functions f and k · k is the Hilbert norm of W.- For f ∈ F (W), the polar function f ∗ of f is given by f ∗(v∗) = sup {hv∗,v i − f (v)} ∀v∗ ∈ W v∈dom(f )
where dom(f ) = {v ∈ W | f (v) < +∞}.
- For v0 ∈ dom(f ), the set:
∂f (v0) = nv∗ ∈ W | f (v) ≥ f (v0)+ hv∗,v − v0 i ∀v ∈ Wo denotes the subdifferential of f at v0, then we
∗
have v1 ∈ ∂f (v ) if and only if f (v∗)+f ∗(v1) = hv∗,v1 i
With all these notations, the problem (7) is equivalent to:
 tor functional of Uad (Uad a non empty subset of U).
tor functional of Uad (Uad a non empty subset of U).
2
- σ(u) =ku k .
Hence the solution of (8) is characterized by the following result.
Theorem 2 u∗ is a solution of (7) if and only of if the system (2) is Θ-gradient controllable on Γ and:
u∗ ∈ Uad and ΨU∗ad (−u∗) = −ku∗ k2 · (9)
Demonstration: The system (2) is Θ-gradient controllable on Γ, then Uad , ∅. Using Fermat’s rule, we have u∗ is a minimum of (7) if and only if 0 ∈ ∂ σ +ΨUad (u ).
We prove that Uad is convex, for that we consider u and v two elements of Uad. So χΓ γ ∇yu (T ) ∈ Θ and χΓ γ ∇ytu+(1−t)v (T ) ∈ Θ for t ∈ [0,1] which prove the convexity.
And we have σ ∈ F (U) and since Uad is closed, convex and non empty, then ΨUad ∈ F (U)
Moreover, domσ ∩ domΨU , ∅ because the system (2)
ad is Θ-gradient controllable on Γ.
Furthermore,Uad (u ) = ∂σ(u ) + ∂ΨUad (u ) (σ ∗ is continuous). It follows that u is a solution of (7) if and only if 0 ∈ ∂σ(u∗)+∂ΨUad (u∗).
Besides we have σ is Frechet-Differentiable, hence ∂σ(u∗) = {u∗ }. Furthermore, u∗ is the solution of (7) if and only if −u∗ ∈ ∂ΨUad (u∗) which is equivalent to ΨUad (u∗) + ΨU∗ad (−u∗) = −ku∗ k2. And which gives u∗ ∈ Uad and ΨU∗ad (−u∗) = −ku∗ k2.
4.2. Lagrangian approach
We consider the problem (1) when the system (2) is excited by one actuator (D,f ). The following result gives a useful characterization of the solution of the problem.
Theorem 3 If the system (2) is Θ-gradient controllable on Γ then the solution of (1-2) is given by:
 while P→ Θ denotes the projection operator, ρ > 0 and RH.
while P→ Θ denotes the projection operator, ρ > 0 and RH.
Demonstration: If the system (2) is Θ-gradient controllable on Γ then Uad , ∅ and the problem (1-2) has a unique solution.
The minimization problem (1) is equivalent to the following saddle point problem:
 where Z = (u,z) ∈ Uad × Θ | χΓ γ ∇yu (T ) − z = 0 .
where Z = (u,z) ∈ Uad × Θ | χΓ γ ∇yu (T ) − z = 0 .
To study this constraints, we will use a Lagrangian functional and steer the problem (12) to a saddle point problem.
We associate to the problem (12) the Lagrangian functional defined by:
 We prove that L admits a saddle point: The set Uad × Θ is non empty, closed and convex. The functional L satisfies these conditions:
We prove that L admits a saddle point: The set Uad × Θ is non empty, closed and convex. The functional L satisfies these conditions:
- (u,z) 7→ L(u,z,λ) is convex and lower semin continuous for all.
- λ 7→ L(u,z,λ) is concave and upper semi-continuous for all (u,z) ∈ Uad × Θ.
Moreover, there existssuch that:
 kλk→+∞
kλk→+∞
Then, the functional L admits a saddle point. For more details we refer to [21]. We prove then that u∗ is a solution of (1) and it is the minimum one:
Let (u∗,z∗,λ∗) be a saddle point of L. Hence, we have:

which implies that u∗ is of minimum energy. . (u∗,z∗) is an optimal solution of (12), then there n exists a Lagrange multipliersuch that the following optimality conditions hold: 
(19) For more details about the saddle point and its theory, we refer to [22–24]. From (17) we deduce (10). which is equivalent to the second equation of (11).
5. Conclusion
This paper is concerned with the regional gradient controllability, which is motivated by many real applications where the objective is to explore the minimum energy control to steer the system under consideration from the initial gradient vector ∇y0 to any gradient vector in an interested subregion of the whole domain. The presented results here can provide some insight into the control theory analysis of such systems. They can also be extended to complex fractional order distributed parameter systems and various open questions are still under consideration.
6. Funds
The work has been carried out with a grant from Hassan II Academy of Sciences and Technology.
- F. Curtain, H. Zwart, An Introduction to Infinite Dimensional Linear Systems Theory, Texts in Applied Mathematics, 21, Springer, New York, 1995.
- F. Curtain, A. J. Pritchard, Infinite Dimensional Linear Systems Theory, Springer Lecture Notes in Control and Informations, Science, Springer, New York, 1978.
- El Jai, A. J. Pritchard, Sensors and Actuators in the Analysis of Distributed Systems, Wiley, New York, 1988.
- El Jai, M. C. Simon, E. Zerrik, A. J. Pritchard, ”Regional controllability of distributed parameter systems.”, International Journal of Control, 62(6), 1351-1365, 1995.
- Zerrik, R. Larhrissi, ”Regional target control of the wave equation.”, Int. J. Syst. Sci., 32, 105-110, 2001.
- Zerrik, R. Larhrissi, ”Regional Boundary Controllability of Hyperbolic Systems. Numerical Approach.”, Journal of Dynamical and Control Systems, 8, 293-311, 2002.
- Zerrik, F. Ghafrani, ”Minimum energy control subject to output constraints numerical approach.”, IEE Proc.-Control Theory Appl., 149(1), 105-110, 2002.
- Boutoulout, H. Bourray, F. Z. El Alaoui, L. Ezzahri, ”Constrained Controllability for Distributed Hyperbolic Systems.”, Math. Sci. Lett., 3(3), 207-214, 2014.
- Karite, A. Boutoulout, ”Regional constrained controllability for parabolic semilinear systems.”, International Journal of Pure and Applied Mathematics, 113(1), 113-129, 2017.
- L. Lions, E. Magenes, Problmes aux limites non homognes et applications, Dunod, 1, 1968.
- Zeidler, Applied functional analysis : Applications to mathematical physics, Springer-Verlag, New York, 1995.
- B. Agase, V. Rchavendre, ”Existence of mild solutions of semilinear differential equations in Banach spaces.”, Indian J. pure appl. Math., 21(9), 813-821, 1990.
- Kurula, H. Zwart, ”The Duality Between the Gradient and Divergence Operators on Bounded Lipschitz Domains.”, Department of Applied Mathematics, University of Twente, October 2012.
- Kamal, A. Boutoulout, S. A. Ould Beinane, ”Regional Gradient Controllability of Semi-Linear Parabolic Systems.”, International Review of Automatic Control, 6(5), 2013.
- Zerrik, A. El Jai, A. Boutoulout, ”Actuators and regional boundary controllability of parabolic system.”, Int. J. Syst. Sci. 31(1), 73-82, 2000.
- P. Aubin, S. Wilson, Optima and Equilibria: An Introduction to Nonlinear Analysis, Springer-Verlag Berlin Heidelberg, 2002.
- Kusraev, S. S. Kutateladze, Subdifferentials: Theory and Applications, Springer Netherlands, 1995.
- Matei, ”Weak solvability via Lagrange multipliers for two frictional contact models.”, Annals of the university of Bucharest (mathematical series), 4, (LXII), 179-191, 2013.
- Brezzi, M. Fortin, Mixed and Hybrid Finite Element Methods, Springer-Verlag, New York, 1991.
- Fortin, R. Glowinski, Augmented Lagrangian Methods: Applications to the numerical solution of boundary-value problems, North-Holland, 15, 1983.
- T. Rockafellar, ”Lagrange multipliers and optimality”, SIAM Review, 35(2), 183-238, 1993.
Citations by Dimensions
Citations by PlumX
Google Scholar
Scopus
Crossref Citations
No. of Downloads Per Month
No. of Downloads Per Country